
記住我

A power analysis, conducted using G*Power 3.1 software, determined a required sample size of 26 participants. This analysis aimed for 80% power, accounting for 10% dropout rate. The calculation was based on an effect size of 0.614, as reported by Audu et al. (2016) for the relative contribution of derivative component in seated perturbation responses (normal controls: 65 ± 2; individuals with SCI: 57 ± 7) [17].
This study enrolled 17 individuals with SCI and 18 age- and gender-matched healthy controls at Shanghai YangZhi Rehabilitation Hospital (Table 1). Individuals with SCI met the diagnostic criteria for thoracic SCI according to the American Spinal Injury Association for at least one year [18]. They could sit upright for more than 10 min without back support, using their upper extremities for protection. Individuals with SCI were excluded if they had: (1) other neurological illnesses; (2) visual or vestibular impairment; (3) cognitive impairment; and (4) severe complications, such as muscle tone abnormality or neuropathic pain with a VAS score greater than 5. Healthy controls were excluded if they had a history of neurological or trunk musculoskeletal illnesses, or had recently engaged in intense exercise.
Table 1 Participants characteristicsThis study conformed to the ethical requirements in accordance with the Declaration of Helsinki. Ethical approval for the protocol was obtained from the ethics committee of Shanghai YangZhi Rehabilitation Hospital (SBKT-2024-001). Written informed consent was obtained from each participant prior to the study.
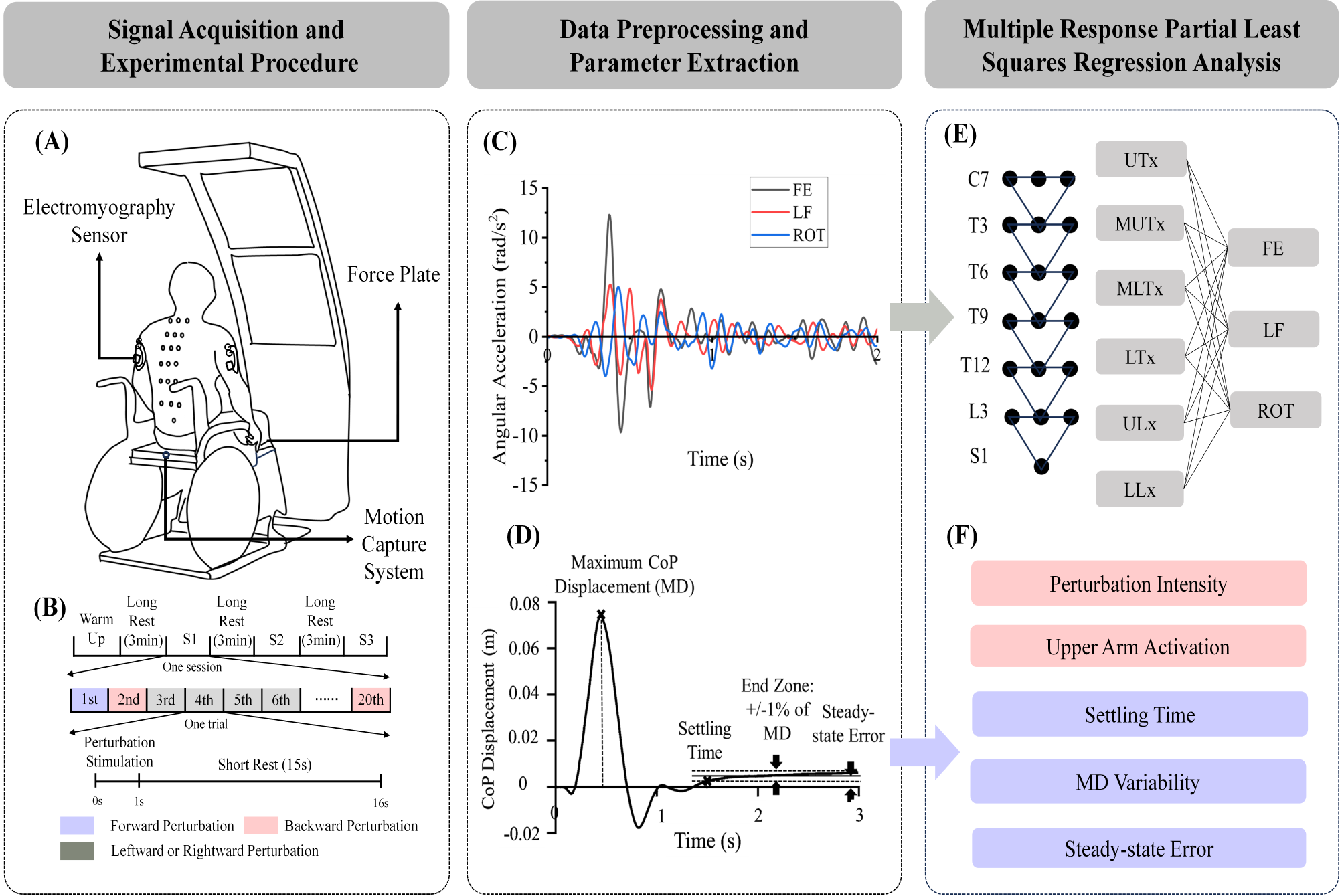
Experimental design and procedureParticipants sat upright in the testing wheelchair on the BalanceTutor (BalanceTutor, MediTouch, USA) after their demographic details were recorded (Fig. 1A). They were required to complete challenging seated perturbation tasks, the intensity of which was set to 70% of the maximal acceptable strength in each direction. Participants held on to the wheelchair arm rests for safety, but were instructed to use trunk strength and minimize upper extremity exertion during perturbations. Additionally, a safety monitor will be present during the perturbation process.
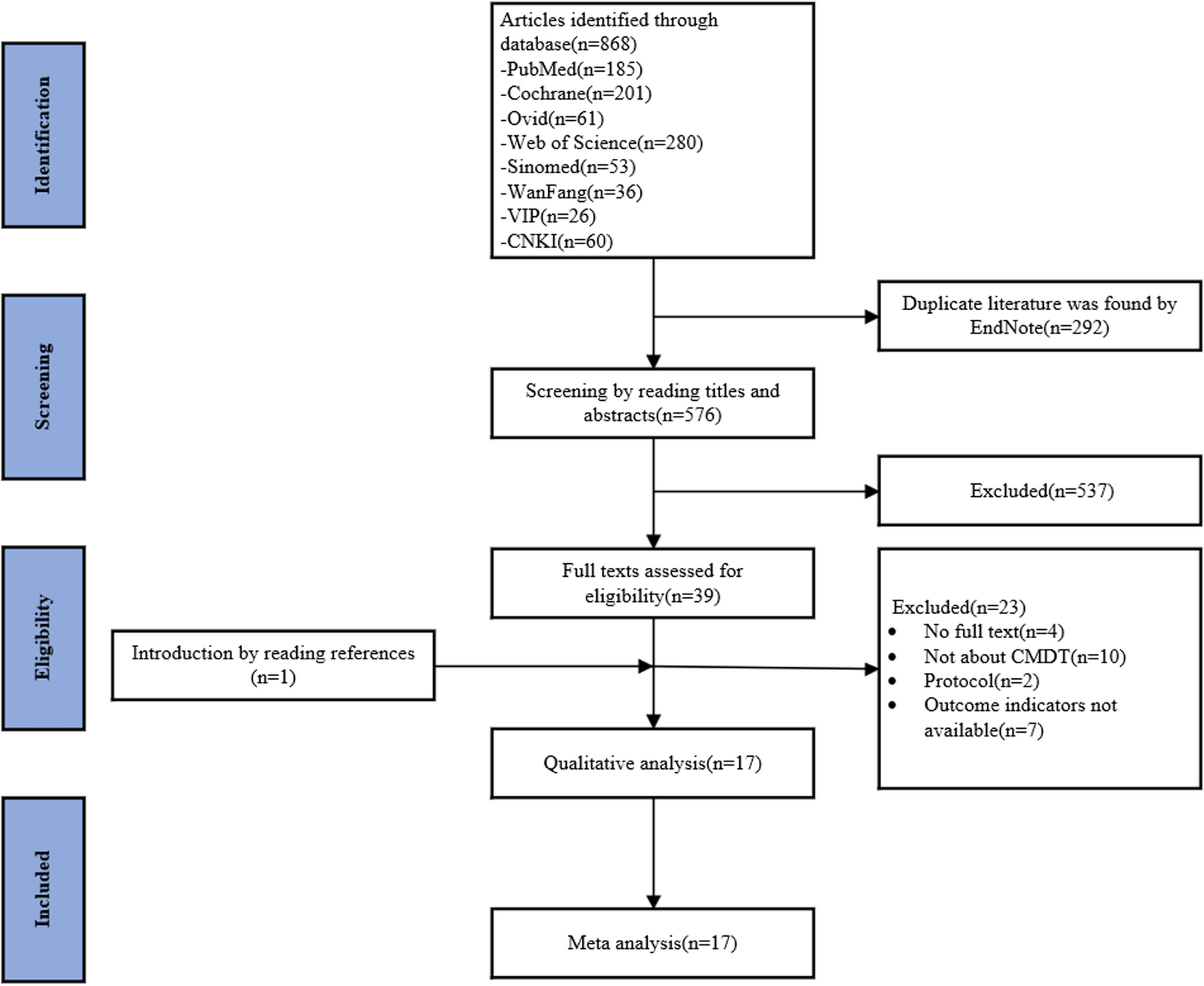
Fig. 1
The experimental design and data processing flow. (A) Experimental setup, (B) experimental procedure, (C) angular acceleration response, (D) center of pressure displacement response, (E) complexity parameters, and (F) seated performance parameters. UTx, upper thoracic segment; MUTx, mid-upper thoracic segment; MLTx, mid-lower thoracic segment; LTx, lower thoracic segment; ULx, upper lumbar segment; LLx, lower lumbar segment; FE, flexion-extension; LF, lateral flexion; ROT, rotation; CoP, center of pressure; MD: maximum center of pressure displacement
Each individual experienced 80 perturbations in total. The first 20 perturbations were conducted at the test intensity before the actual test, serving as the warm-up phase. Sixty perturbations were administered in a sequential condition, divided into four directions (with 15 perturbations each). Forward and backward perturbations were regarded as experimental conditions, whereas leftward and rightward perturbations served as wash-out test conditions. The 60 perturbation tests included three sessions, separated by 3-minute intervals to prevent muscle fatigue. Each session consists of 20 trials, with each trial including one perturbation stimulus and a 15-second rest period. Each perturbation comprised a 300 ms acceleration phase, followed by a brief period of approximately 50 ms during which a relatively constant linear velocity was maintained, and concluded with a 300ms deceleration phase.
Data acquisitionSynchronous surface electromyography (sEMG), kinematic, and kinetic data were recorded. Upper arm muscle activation was measured to determine hand force exertion. A wireless sEMG system (Noraxon, Scottsdale, USA) was used to collect data at 2000 Hz from bilateral biceps brachii and triceps brachii. Electrode placement followed the SENIAM recommendation [19]. A Qualisys motion analysis system (Qualisys, Gothenburg, Sweden) captured 3D kinematic data from marker locations at 200 Hz. Marker placement included the spinous processes of the 7th cervical vertebra (C7), the 3rd, 6th, 9th and 12th thoracic vertebrae (T3, T6, T9 and T12), the 3rd lumbar vertebra (L3) and the 1st sacral vertebra (S1). Additionally, markers were also placed 5 cm lateral to C7, T3, T6, T9, T12 and L3. These marker groups defined the following spinal segments: upper lumbar segment (ULx), lower thoracic segment (LTx), mid-lower thoracic segment (MLTx), mid-upper thoracic segment (MUTx) and upper thoracic segment (UTx) [20]. A reflective marker was used to monitor the wheelchair seat motion. Center of pressure (CoP) displacement data was also collected at 200 Hz using a Kistler portable force plate (Kistler, Winterthur, Switzerland) under the buttocks.
sEMG data processing and perturbation quality monitoringAll the data were processed in MATLAB (MathWorks, USA). The raw sEMG data was bandpass filtered (10–400 Hz) with a fourth-order Butterworth filter. The obtained signals were then full-wave rectified, and segmented into 100 ms windows to calculate the root mean square (RMS) of the upper arm. Normalized RMS amplitudes were obtained using the maximum contraction amplitude method [21]. RMS results were averaged, since the study did not focus on the difference between bilateral and muscle-specific activation. Perturbations with outlier RMS values were removed to ensure consistent upper extremity activation levels. These outliers were identified as values exceeding 1.5 times the interquartile range of the RMS values calculated across all perturbations, indicating unusually high levels of upper extremity exertion.
Motion complexity analysis based on kinematic dataA fourth-order Butterworth low-pass filter with an 8 Hz cutoff frequency was applied to trunk segmental motion data [9]. Perturbation initiation was defined as wheelchair acceleration above the baseline mean plus five standard deviations [17]. Relative angular acceleration for each spinal segment was calculated in three DOFs, including flexion-extension (FE), lateral flexion (LF), and rotation (ROT) (Fig. 1C) [20], measuring the orientation of each trunk segment relative to that of the segment below. The Cartesian axis system used to describe different DOFs is consistent with the previous work [20]. Despite the proximity of the spinal segments, the relative angular acceleration shows good resolution and aligns segmental spinal motion patterns with vertebral facet orientations, effectively identifying normal motion trends and detecting differences in individuals with SCI (Fig. S1).
The sample entropy was then used to quantify the complexity of angular acceleration signals during the settling period (the time from the onset of perturbation to reaching settling time), with the Chebyshev distance between each subsequence calculated, followed by counting the number of similar subsequences within the tolerance [22]. The calculation formula was defined as follows:
$$\:S\textEn(m,r)=-In\left(\frac_^_}_^_}\right)$$
(1)
Where N represents the length of the time sequence; Ai represents the number of similar subsequences for each subsequence; The subsequence length m was set to 2, and tolerance r was calculated as 0.15 times the standard deviation of the entire time series [23].
Seated perturbation performance analysis based on kinetic dataA fourth-order Butterworth low-pass filter with a 10 Hz cutoff frequency was applied to the CoP data. Three aspects of seated balance ability were assessed based on the CoP data in the perturbation direction (Fig. 1D):
(1)Settling time: It referred to the point at which the fluctuations of CoP first stabilized within 2% of the maximum CoP displacement (MD) for a duration of at least 0.5 s indicating balance recovery speed [24].
(2)MD variability: It was measured by determining the coefficient of variation of max CoP displacement across trials, reflecting postural control stability [25].
(3)Steady-state error: It was the discrepancy between initial and final CoP displacement after response stabilization, quantifying postural control accuracy [24].
Additionally, perturbation intensity and upper arm activation were also considered to be measures of overall motion performance (Fig. 1F).
Statistical analysisStatistical analysis was performed using SPSS 25 (IBM SPSS Statistics, Chicago, IL, USA). The Shapiro-Wilk test and Levene’s test were used to examine the normality and homogeneity of variance of demographic parameters, seated balance parameters, and trunk motion complexity parameters. Independent samples t-test and chi-square test compared population characteristics and count data between groups. Repeated measures analysis of variance examined the effects of group and perturbation direction on complexity and performance characteristics. Friedman and Dunn-Bonferroni tests assessed motion complexity differences across spinal segments. Pearson correlation coefficients were used to determine the influence of two confounding factors, including intensity and upper arm activation. The statistical significance was set at two-tailed P < 0.05.
Multiple response partial least squares regression was employed to explore the relationship between trunk motion complexity parameters (18 independent variables, including sample entropy of six spinal segmental motion in three DOFs) and balance performance (5 dependent variables, including speed, stability, and accuracy of seated postural control, perturbation intensity, and upper arm activation) in individuals with SCI, addressing potential multicollinearity. The variables were transformed using Z-score normalization before the analysis. To capture the most relevant information while minimizing overfitting, five components were selected. The model’s accuracy was evaluated using leave-one-out cross-validation, as measured by coefficient of determination (R2) and root mean square error of cross-validation (RMSECV). The regression coefficients indicate the direction and strength of motion complexity’s influence on balance performance. The variable importance in projection (VIP) score indicates a significant contribution from specific segmental motion complexity if it is greater than 1.
留言 (0)