
記住我

This section details the material and methods utilized to evaluate the control strategy presented in Sect. "Fault-tolerant torque control" to achieve fault tolerance in a knee exoskeleton as a scenario of tight pHRI interaction. The knee exoskeleton is presented, followed by an experimental functional evaluation with a single user, and finally a user study design to evaluate fault tolerance and user interaction with multiple participants.
Knee exoskeletonFigure 4 shows the design of the knee exoskeleton for experimentation on a treadmill. Powered by the SMARCOS actuator [33], a mechanically adjustable compliance and controllable equilibrium position actuator (MACCEPA), the exoskeleton attaches to the leg segments using braces 3D-printed with technical flexible filament (Flexfill TPU) and secured with Velcro straps. Adjustable plates and alignment screws allow to customize the brace positions in the proximal/distal and medial/lateral directions to ensure that the axis of rotation of the actuator aligns with that of the knee of the user. A shoulder strap supports the weight of the device (4.05 kg) during walking. Finally, the elastic properties of the actuator can be modulated by altering the pretension of a linear spring using a servomotor, effectively emulating elastic faults.
Fig. 4
Knee exoskeleton experimental setup. The elastic actuator, which drives the exoskeleton, is equipped with a pretension altering mechanism to emulate faults by changing the elastic behavior of the actuator. The exoskeleton is attached to the user using braces with Velcro straps and adjustable plates with alignment screws to customize the brace positions in the proximal/distal and medial/lateral directions. A shoulder strap is included to support the weight of the device. An instrumented insole, embedded with a force-sensing resistor, is used to detect heel strike
The actuator configuration, shown in Fig. 5, consists of an input link between points A and R, an output link between points C and R, and a lever arm between points B, R, and D, all rotating around point R. The input link and the lever arm are rigidly coupled through a motorized screw drive between points A and B. Moreover, a linear spring with stiffness k is connected between points C and D. The positions of the lever arm \(\varphi _i\) and output link \(\varphi _o\) are measured with magnetic encoders, their speeds are computed with filtered numerical derivation, and the elastic torque \(\tau _o\) is indirectly computed from force measurement at the base of the motor.
The output torque \(\tau _o\) created by the spring due to the deformation \(\alpha = \varphi _i-\varphi _o\) can be computed based on the geometric properties of the actuator [34]:
$$\begin \tau _o = \text (\alpha ) = kL_CL_D\sin \left( 1+\frac}\right) ,\\ \text L_=\left( L_C^2+L_D^2-2L_CL_D\cos \right) ^\,,\nonumber \end$$
(13)
where \(L_C\) is the length between points C and R, \(L_D\) is the length between points D and R, and P corresponds to the pretension length of the spring. The solution of eq. (13) for \(\alpha\) is not analytically possible. Therefore, the Newton–Raphson iterative method, described in Sect. "Fault-tolerant torque control", is used to find a numerical solution.
The behavior of the MACCEPA is that of a SEA with a nonlinear torque function. At a given deflection, the apparent stiffness of the actuator can be computed based on eq. (7) as
$$\begin k_ = kL_CL_D\cos \left( 1+\frac}\right) -kL^2_CL^2_D\sin ^2\left( \frac^3}\right) . \end$$
(14)
Modifying the pretension P alters the behavior of \(\text (\alpha )\) and \(k_s\) and thus emulates elastic faults as they might be caused by plastic deformations in the spring or cables in the coupling mechanism.
Fig. 5
Kinematic model of the MACCEPA-based actuator
Functional evaluation experimentsWe tested the performance of the exoskeleton while walking on a treadmill at a fixed speed in two different conditions: In zero-torque mode, the provided support is zero, i.e., the user can walk freely, ideally without resistance; and in support mode, a torque profile is provided in synchronism with the gait cycle. Experiments were carried out with one experienced user (male, 177 cm, 90 kg) walking on a treadmill at 0.58m/s. The synchronization of gait cycle was triggered by a force-sensing resistor (FSR) embedded in an instrumented insole, which detects heel strike as the beginning of the gait cycle. For simplicity, and to avoid introducing noisy signal derivatives to the control law, we assume that the position reference \(\varphi _\) is static, i.e., \(\dot_=0\) and \(\ddot_=0\) .
The friction is modeled combining dry (Coulomb) and viscous components [35]:
$$\begin \tau _\text = c_\,}}} + c_v\dot\,, \end$$
(15)
where \(c_c\) and \(c_v\) are the Coulomb and viscous friction coefficients, respectively. The parameters of the actuator, extracted from [26] and [33], and the control parameters used in the experimentation are detailed in Table 1.
Table 1 Parameters of the MACCEPA-based actuatorZero-torque modeConsidering the strategy presented in Sect. "Fault-tolerant torque control", a fixed zero-torque support \(\tau _=0\) is obtained when \(\varphi _=\varphi _o\). This should be achievable in dynamic conditions with a fast enough response from the motor. However, in practice, the motor is limited both in maximum speed and acceleration, which might lead to deviations from the desired zero-torque reference. Figure 6 shows the residual torque measurements and motor shaft speed (before transmission) throughout 60 gait cycles of the user walking with the exoskeleton in zero-torque mode with two different pretension values (mean and SD shown as line and shaded area, respectively). It is obvious that the residual torque is higher during swing, where the output position has a faster motion. With a pretension value of \(P=\) mm, the root mean square (RMS) of the residual torque measurements was 0.30 N m; and for a pretension value of \(P=\) mm, the obtained RMS was 0.10 N m. A lower pretension value attains a lower residual torque, which is to be expected since the system becomes inherently softer. This, in turn, might affect user perception as a softer configuration might lead to a more transparent interaction in zero-torque control. From the motor shaft speed measurements, it is noticeable that the higher torque deviations occur at points where direction changes and when the motor saturates at its no-load speed. This showcases the limitations of the motor in terms of acceleration and speed. Higher walking speeds could then increase the residual torque during swing, and seriously affect user perception.
Fig. 6
Torque and motor shaft speed measurements throughout 60 gait cycles of a user walking on a treadmill at 0.58m/s wearing the knee exoskeleton in zero-torque mode with two pretension configurations: P=4mm (shown in blue) and P=1mm (shown in yellow). Mean and SD are shown as line and shaded area, respectively. Torque is computed from eq. (13) with measured deflection and known pretension value. Data RMS: 0.30 N m for P = 4 mm and 0.10 N m for P = 1 mm. The lower pretension configuration attains a lower residual torque which might affect user perception. Motor shaft speed measurements showcase the limitation of the motor in terms of acceleration and speed to maintain the desired zero torque during swing
Support modeBiomechanical joint torque data from walking experiments [36, 37] showed that the knee presents a peak of extension torque during early stance, followed by a peak of flexion torque during late stance. Accordingly, the torque profile used in [38] for knee exoskeleton support was implemented in this work. The applied torque profile is shown in Fig. 7. It is characterized by timing parameters \(t_1\), \(t_2\), and \(t_3\), and a support level \(\tau _\text \), which corresponds to the peak of extension torque. To reduce the number of parameters, the peak of flexion torque is kept at half of the support level, i.e., \(\frac\tau _\text \). The curve is generated using a Piecewise Cubic Hermite Interpolating Polynomial (PCHIP) with waypoints at \((0,0),(t_1,0),(\frac,-\tau _\text ),(t_2,0),(\frac,\frac\tau _\text ),(100,0)\). It is important to mention that the provided torque profile does not necessarily correspond to a biomechanically optimal trajectory for an intended purpose, e.g., metabolic cost reduction or rehabilitation, nor was the intention of this work to determine an optimal torque profile. Instead, it serves as a scenario of close interaction to test fault tolerance and user experience.
Fig. 7
Torque profile for walking support (top) compared to characteristic sagittal plane knee joint angles during a single gait cycle (bottom), reproduced from [39]. Extension support with a peak torque of \(\tau _\text \) is provided during early stance and flexion support with a peak torque of \(\frac\tau _\text \) is provided during late stance. No support is provided during swing. The profile is characterized by timing parameters \(t_1\), \(t_2\), and \(t_3\). The curve is generated using a Piecewise Cubic Hermite Interpolating Polynomial (PCHIP) with waypoints marked with yellow circles
During experimentation, faults are emulated by lowering the pretension value P from its initial value of 4 mm (\(P=100\%\)) to different fault levels: Low Fault (\(P=75\%\)), Mid Fault (\(P=50\%\)), and High Fault (\(P=25\%\)). Furthermore a compensated fault condition was set when the control strategy utilizes the actual value of P for calculations, and an uncompensated fault condition was set by utilizing the initial pretension (\(P=100\%\)) for calculations.
Figure 8 shows the results of the torque tracking with all different fault conditions throughout 60 gait cycles (mean and SD shown as line and shaded area, respectively). From the plots, it can be seen that for uncompensated faults, the obtained deflection remains similar throughout all fault conditions. Due to the lower stiffness when faults are emulated, the obtained output torque deviates from the reference, with the deviation increasing as the fault becomes more severe. In other words, uncompensated elastic faults lower the torque support level with respect to the fault severity. When faults are compensated, the obtained deflection increases in order to attain the torque reference. That means that higher fault severity requires higher deflection in order to maintain the desired torque level. This might also be a limiting factor, particularly for higher walking speeds, as the saturation of the motor speed might not allow to track the reference torque accurately. Special care should also be taken to avoid damaging the actuator if mechanical limits in position are reached. Yet, it is clear that the torque assistive control strategy is capable of maintaining the torque support level in the presence of faults, effectively achieving fault tolerance.
Fig. 8
Torque and deflection measurements throughout 60 gait cycles of a user walking on a treadmill at 0.58 m/s wearing the knee exoskeleton providing a torque support profile in four configurations: (a) no fault, (b) low fault, (c) mid fault, and (d) high fault. Mean and SD shown as line and shaded area, respectively. Torque is computed from Eq. (13) with measured deflection and known pretension value. Measurements with uncompensated faults (in yellow) show that deflection remains similar throughout all conditions, while the torque level degrades as the fault increases in severity. Measurements with compensated faults (in blue) show that torque levels are maintained close to the reference by increasing deflection, achieving fault tolerance
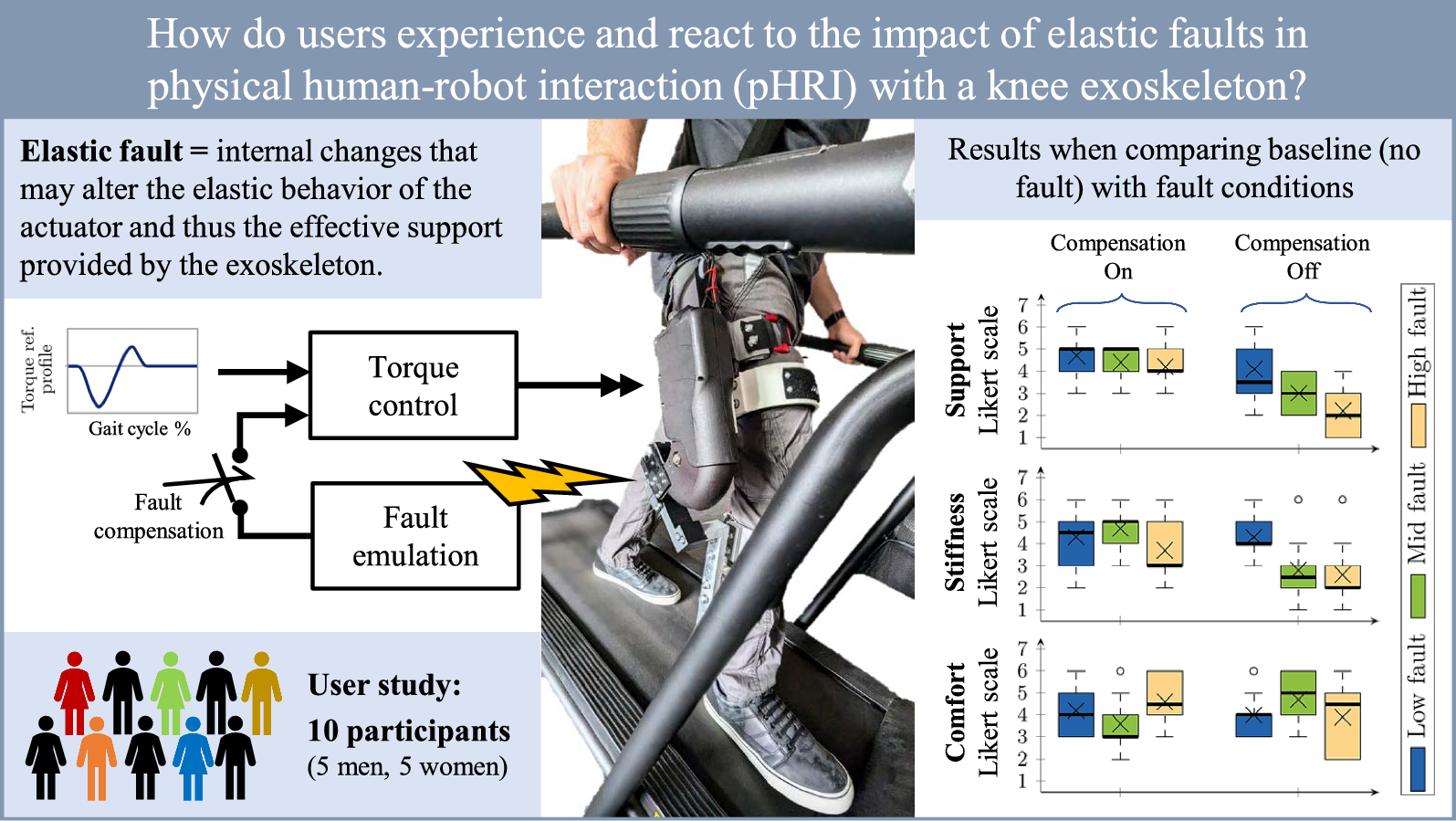
User study designA user study was conducted using the knee exoskeleton on healthy participants during walking on a treadmill. The objective of the study was to investigate how user experience changes in torque levels due to elastic faults during physical interaction with the exoskeleton. The study was conducted with 10 participants (5 women, 5 men) with an average age of \(\) years and an average weight of \(\) kg. Informed consent was obtained from all participants involved in the study. The experimentation was conducted in accordance with the Declaration of Helsinki 2008 and a vote from the Ethics Commission at TU Darmstadt (EK 18/2017). A technician from Sanitätshaus OrthoPoint supervised the orthopedic soundness of the knee exoskeleton and provided suggestions and guidelines for the adjustment of the knee exoskeleton. Accordingly, the leg attachments were individually fitted for each participant.
The experimental setup is the same as described in Sect. "Functional evaluation experiments" and represented in Fig. 9. The torque profile shown in Fig. 7 was utilized as torque reference for the control strategy implemented in the knee exoskeleton, while an instrumented insole was used to detect heel strike and synchronize the beginning of each gait cycle. The walking speed was kept fixed at 0.58m/s for all participants to avoid introducing high residual torque during swing, as discussed in Sect. "Zero-torque mode". A repeated-measures experiment was devised with two independent variables (IV). The first IV is the fault severity, which is defined by the value of the pretension P with respect to its baseline value: Low Fault (\(P=75\%\)), Mid Fault (\(P=50\%\)), and High Fault (\(P=25\%\)). The second IV is the fault compensation, which is either compensated or uncompensated. To investigate the effects of both IVs, we implemented a 3x2 repeated-measures design, such that participants experienced 6 different walking conditions in a random order. The dependent variables are the levels of support, stiffness, comfort, and trust perceived by the users at each condition. The configuration where no fault occurs (\(P=100\%\)) is considered the baseline walking condition and serves as a comparison condition for each of the 6 faulty walking conditions.
Fig. 9
Schematic of experimental setup for the user study on user perception. A controller commands a torque profile based on the user’s gait (synchronized by heel strike). Elastic faults are emulated by altering the spring pretension of the actuator. Faults are compensated when the controller knows the precise altered pretension value, and the torque is corrected
When the torque profile is applied, participants should be able to distinguish the torque support level depending on the maximum effective torque provided. At the same time, the perception of stiffness, which is expected to be closely related to force perception [30], and walking comfort might also depend on the support level. Furthermore, trust is also an important aspect to measure in the presence of faults, as it allows to understand which aspects contribute to understanding user experience. The hypotheses of the repeated-measures study were:
Hypothesis 1a: Participants will perceive changes in support level when faults are uncompensated but not when they are compensated.
Hypothesis 1b: Participants will perceive changes in stiffness when faults are uncompensated but not when they are compensated.
Hypothesis 1c: Participants will perceive changes in comfort when faults are uncompensated but not when they are compensated.
Hypothesis 2: Trust is scored higher for compensated faults than for the uncompensated conditions.
Hypotheses 1a, 1b, and 1c required that participants compared each condition with the baseline condition, while hypothesis 2 required that participants evaluated their perceived trust after each condition. To achieve this in the repeated-measures study, participants walked with the baseline walking condition for 30 s, followed by 30 s of the faulty condition. To safeguard the mechanical soundness of the pretension altering mechanism, 10 s were left between both walking conditions where the participant stopped walking and the pretension was altered. After each repeated measure, the participant filled out the comparison questionnaire, shown in Fig. 10, which evaluates the perceived level of support, stiffness, and comfort between the baseline and the new condition using a Likert scale of comparison: 1 : a lot lower, \(2 \!=\!\) lower, \(3 \!=\!\) slightly lower, \(4 \!=\!\) the same, \(5 \!=\!\) slightly higher, \(6 \!=\!\) higher, \(7 \!=\!\) a lot higher; and the trust questionnaire, shown in Fig. 11, extracted from Jian et al. [40], which evaluates trust in terms of confidence, security, and dependability with a Likert scale of agreement: \(1 \!=\!\) strongly disagree, \(2 \!=\!\) disagree, \(3 \!=\!\) slightly disagree, \(4 \!=\!\) neutral, \(5 \!=\!\) slightly agree, \(6 \!=\!\) agree, \(7 \!=\!\) strongly agree.
Fig. 10
Comparison questionnaire. Compares levels of support, stiffness, and comfort
Fig. 11
Trust questionnaire. Evaluates confidence, security, and dependability. Extracted from [40]
At the beginning of the study, participants received initial instructions and were requested to don the instrumented heel insole and the knee exoskeleton. Adjustments to the leg attachments were made to ensure that the knee exoskeleton was fitted to the individual body geometry. The participant was asked to walk on the treadmill with the zero-torque mode at a slow walking speed of 0.58m/s. A low torque support profile with \(\tau _\text =\) N m/kg (normalized to the user weight) was provided to the participant. Timing parameters \(t_1\), \(t_2\), and \(t_3\) were initially set to \(t_1=10\%\), \(t_2=40\%\), and \(t_3=60\%\) and subsequently minimally adjusted in a range of \(\pm 10\%\) based on verbal response from the participant and observed gait pattern measurements, such that the profile did not greatly disturb the natural gait of the participant. This adjustment was not meant to optimize the timing parameters, instead, it was applied to find a good compromise for each participant to conduct the study effectively.
Moreover, a method of adjustment experiment was conducted where participants were able to manually adjust the support level by increasing or decreasing \(\tau _\text \) using a provided touchpad. Participants were told to reach a support level that was noticeable but comfortable. The method of adjustment was performed three times, starting from three different support levels in a random order: 0.10 N m/kg, 0.20 N m/kg, and 0.30 N m/kg. Participants were not able to see the actual torque level, only to increase or decrease the level through buttons in the touchscreen. The average of the three adjustments was used as the baseline walking condition. The method of adjustment served two purposes: it gave an insight of the average support level with which users are comfortable at the selected speed of 0.58m/s, while at the same time allowing participants to familiarize with the perception of different support levels such that they can better distinguish them in the subsequent study.
留言 (0)