
記住我

This study conducted two distinct experiments on human subjects. The first experiment served as a feasibility test to verify whether simply supporting the weight of the head with a fixed wire could reduce muscle fatigue. The second experiment aimed to quantitatively evaluate the reduction in muscle fatigue achieved by wearing the exosuit and to assess its qualitative usability from the users’ perspective.
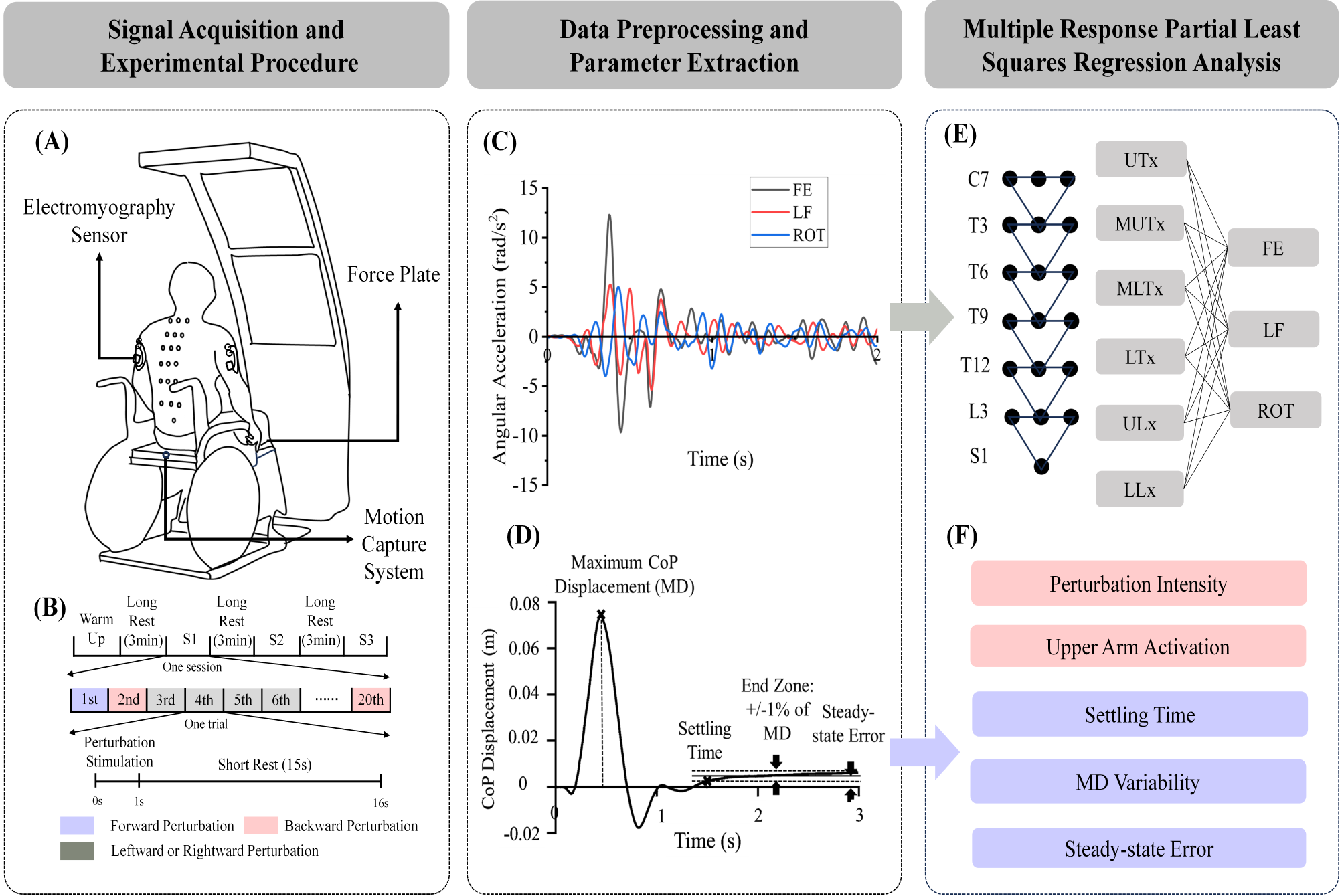
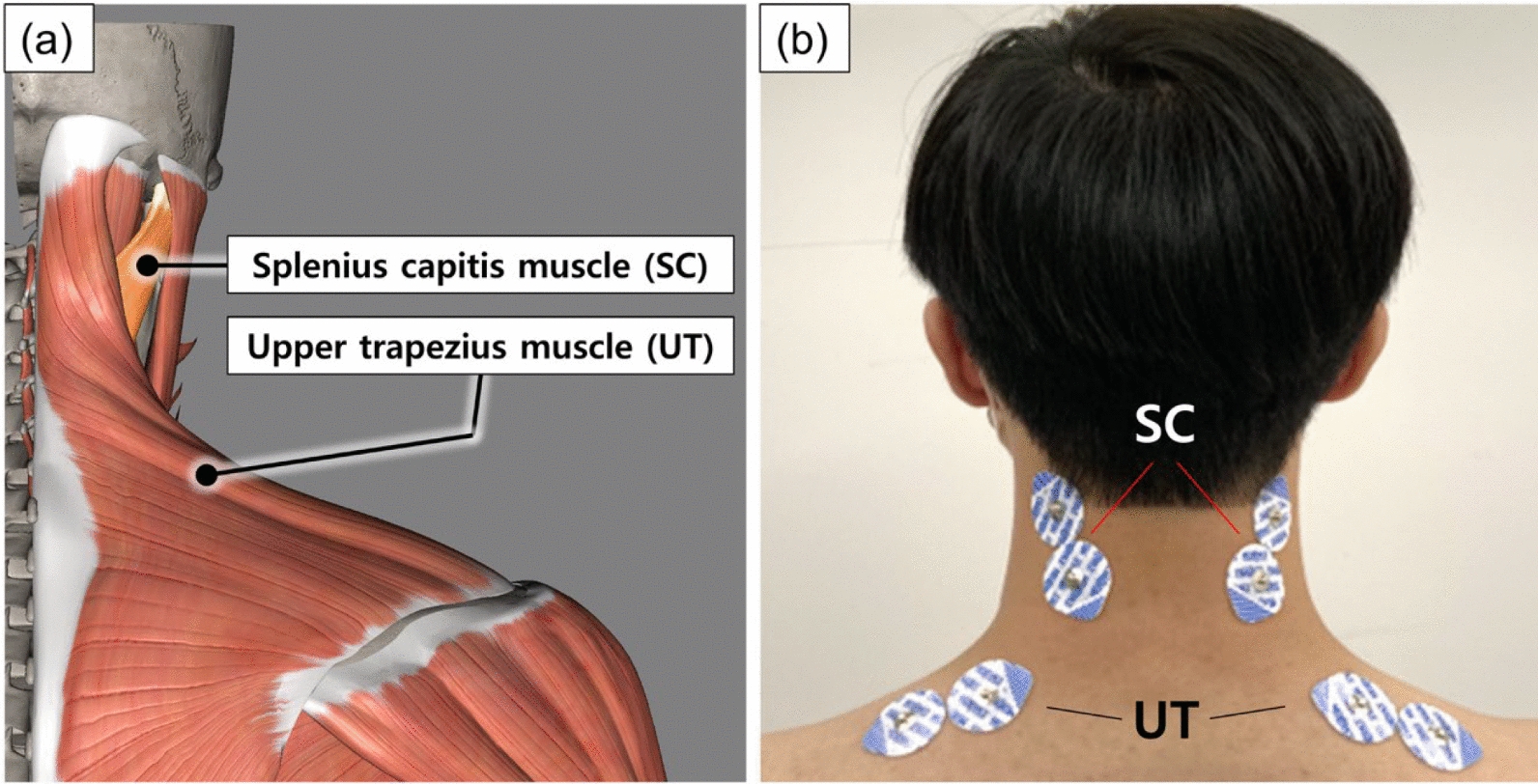
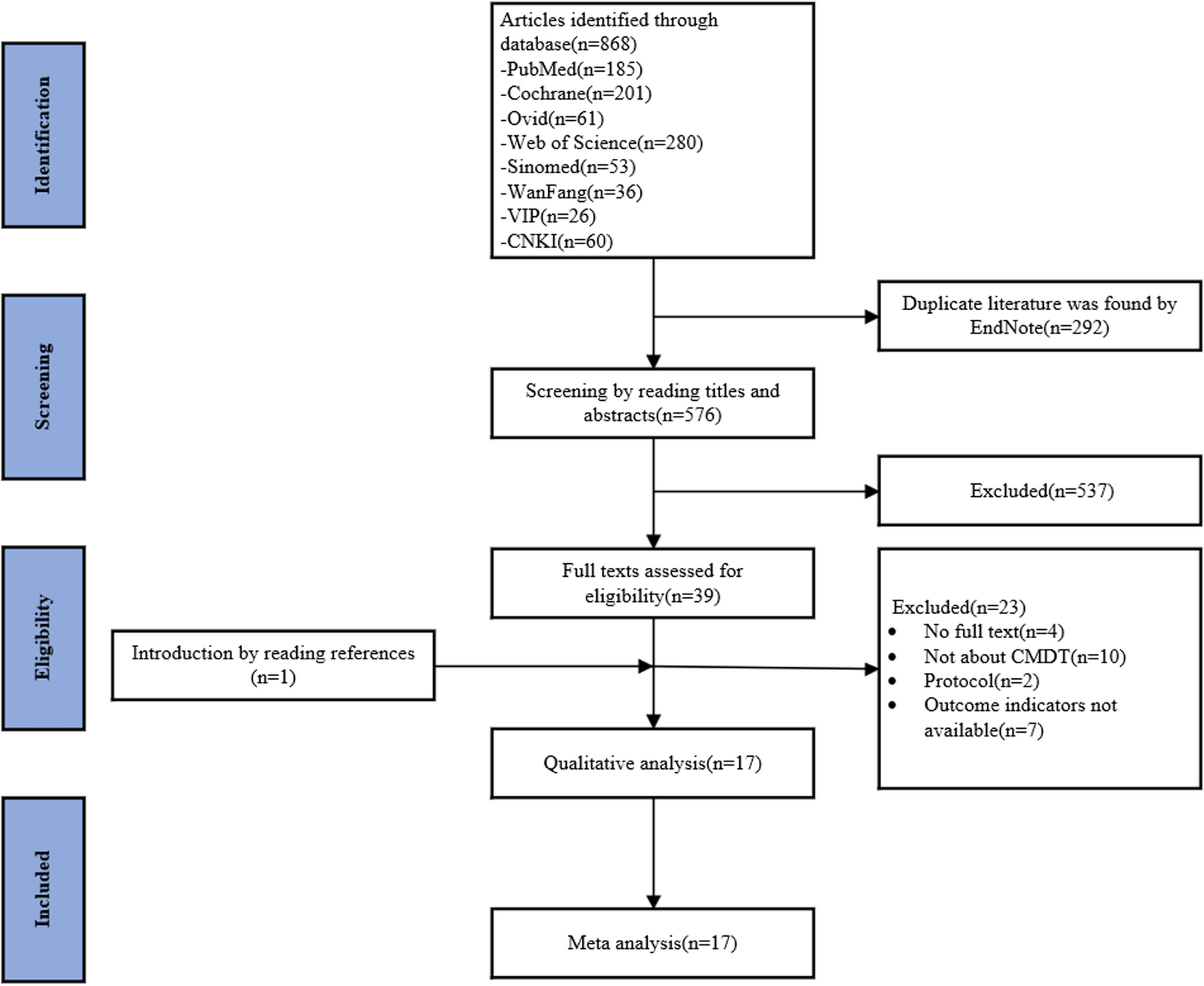
sEMG measurement setupThe DELSYS® Trigno Research + system and Trigno Snap Lead sensors (Delsys Inc., MA, USA) were utilized to measure sEMG of muscles responsible for maintaining flexed neck posture or neck extension movement. The sensors were attached to the pairs of upper trapezius (UT) and splenius capitis (SC) muscles, as shown in Fig. 1. These two muscles are the two representative superficial muscles known to activate during neck extension [36]. SC originates from the spinous process of C7 vertebrae -T3 vertebrae and is inserted into the mastoid process of the temporal bone. The SC muscle is mostly located beneath the UT and sternocleidomastoid muscles, but is closest to the skin in a small exposed area on the side of the neck, as shown in Fig. 1a. The sEMG sensor for SC was located by palpating the muscle belly within the exposed area along the line between T1 vertebrae and the mastoid process, as can be seen in Fig. 1b. The reference electrodes for SC were attached to bilateral deltoid medial muscles. The placement of sEMG sensor for UT was done according to SENIAM recommendations [37]. The reference electrodes were placed on each infraspinatus muscles. After attaching the sEMG sensor, we checked whether the sensor was correctly located on the target muscle by observing the sEMG signal detected while the subjects tilted their head back or lifted their shoulders upward. The skins at the location of target muscle were shaved and sanitized with alcohol prior to attaching sEMG sensors. The EMG signals of each muscle were collected at a frequency of 1024 Hz.
Fig. 1
Positions of target muscles and sEMG sensors. a Anatomical positions of the SC and UT muscle. b Placement of sEMG sensors on the subject
Maximum voluntary contractionBefore experiments, maximum voluntary contraction (MVC) of each SC and UT muscle was measured to normalize muscle activity for each subject. Two distinct processes of MVC measurement were carried out for each SC and UT muscle (see Fig. 2). In the case of SC MVCs, subjects sat in a chair and lightly placed their chest against a chest support. Then they wore a headgear, which was connected to a load cell fixed on the stand via steel cable, restricting head extension at a neutral position. After preparation, subjects were instructed to extend their head against the resistance of the cable. For UT MVCs, subjects sat on a bench with fixed steel chain linkage on each side. They grasped the grip at the end of the chains and pulled them upward while maintaining a straight arm to ensure maximum contraction on UT. To encourage subjects to apply their maximum force in both processes of SC and UT MVC, we showed subjects real-time data from load cells that measured the force applied on the cable or chains. Three sets of 5-s long MVC measurements were completed for each body segment, and the highest value from the moving average of collected data with the 1-s window was chosen. EMG was simultaneously sampled from the relevant muscles at a frequency of 1024 Hz.
Fig. 2
Measurement of MVC for a SC muscle and b UT muscle
Data processingThe Delsys EMGWorks software was used to process all EMG data analysis. DC offsets were eliminated by removing the mean of each signal. The offset signal was band-pass filtered (4th-order Butterworth) at frequencies between 20 and 450 Hz, a typical filter range for SC and UT muscles. The median frequency (MDF) was determined with a fixed window of 125 ms. The moving average with a window size of 1 min was used, option, and the signals were normalized by the average MDF value during the first 1 min of neutral posture during the experiment.
For root mean square EMG (RMS) data, the DC offsets were eliminated by removing the mean of each signal, and the signal was band-pass filtered at frequencies below 20 and above 450 Hz. The RMS data of this signal was then obtained. Similar to MDF, the moving average with a window size of 1 min was used, and the signals were normalized by the largest value recorded during MVCs.
For both MDF and RMS data, the change of value between the neutral posture and the final minute of the experiment was considered as the change in fatigue while performing the task. Also, the linear regression slope for the data collected over 15 min was observed to measure the degree of muscle fatigue change over time. These values were used as indices for comparing w/ and w/o cases. An increase in MDF value signifies a decrease in muscle fatigue, whereas an increase in RMS value denotes an increase in muscle fatigue.
ParticipantsThe first experiment was conducted on four healthy subjects (three males and one female) to verify whether simply supporting the head’s weight with a wire could reduce muscle fatigue. The subjects’ ages, weight, height, and body mass index (BMI) reported as mean and standard deviation were 25.75 ± 1.89 years, 69.50 ± 13.87 kg, 1.76 ± 0.11 m, and 22.13 ± 2.11 kg/m2, respectively. Individual information can be found at Table S1 in Supplementary information. Individuals who are overweight (those with a BMI over 25) and those with any history of musculoskeletal disorders or chronic pain in the back, shoulder, and neck were ineligible to participate. Prior to the experiment, all participants provided written informed consent approved by the Korea Institute of Science and Technology Institutional Review Board (KIST-202303-HR-011).
The second experiment for exosuit evaluation was conducted on 26 healthy subjects (13 males and 13 females). The subjects’ ages, weight, height, and BMI reported as means and standard deviations were 24.81 ± 3.28 years, 1.69 ± 0.08 m, 59.64 ± 10.16 kg, and 20.64 ± 2.16 kg/m2, respectively. Individual information can be found at Table S2 in Supplementary information. The eligibility to participate in the experiment was identical to the previous participant recruitment. Prior to the experiment, all participants provided written informed consent approved by the Korea Institute of Science and Technology Institutional Review Board (KIST-202303-HR-004).
Feasibility testThe sEMG sensors were attached to the subjects’ bilateral upper trapezius (UT) and splenius capitis (SC) muscles. The subject’s head flexion angle was measured with a headgear, which had an integrated inertial measurement unit (IMU) (Biscuit™, WITHROBOT, South Korea) and a laser pointer (see Fig. 3a). The IMU was located at the forehead of the headgear to measure head angle. The laser pointer provided visual feedback to ensure the maintenance of the neck bending posture over the experiment, as the subjects were asked to aim the laser spot within a designated marked area on the desk in front of the subjects. Each subject measured the angle of their neutral posture, and the head flexion angles were measured with respect to this neutral posture angle. The wire tension assist apparatus comprised a load cell and an aluminum frame vertically fixed on a table (see Fig. 3b). A pulley was mounted on the frame, with a wire passing through it to connect between the headgear and the load cell. The subjects were instructed to stand in front of the wire tension apparatus and tilt their heads downward by 45 degrees, maintaining this position for 15 min under two different conditions: one with the wire support (w/) and the other without(w/o). The flexion angle value and the force exerted on the load cell were continuously monitored and recorded during these experiments. The RMS and MDF data from the experiment were normalized by MVC and averaged MDF for the initial 30 s in a neutral head posture, respectively.
Fig. 3
Experimental setup of feasibility test. a Detailed view of headgear components and b experimental setup
A 45-degree head tilt may seem substantial, but it is a common angle seen in many occupational and everyday tasks that involve extended neck flexion. For instance, during open surgery, surgeons typically maintain an average neck flexion of 37.8 degrees, with a standard deviation of 11.4 degrees [38]. Also, it is also found that people tend to maintain head flexion angle of 33–45 degrees while using smartphones [39]. An angle value that is at the upper limit of the ranges suggested in the above studies was chosen. Such angle value would allow us to assess the exosuit’s performance under conditions that impose considerable, yet endurable, strain on the neck muscles. This approach enabled us to better understand the upper limits of the exosuit’s effectiveness and ensure its reliability across various usage scenarios. It was also important to avoid the Flexion Relaxation Phenomenon (FRP) during the experiment [40]. The FRP is the phenomenon where Erector Spinae activity decreases once full trunk flexion is reached. An occurrence of the FRP could distort the EMG signal, leading to inaccurate measurements during the experiment. Based on these studies, 45-degree angle turned out to be a suitable angle along the upper limit of the frequent neck flexion angle range in various activities while avoiding an occurrence of the FRP.
Simple wire support helps reduce muscle fatigueThe feasibility test involved four participants and focused on determining whether the results supported the hypothesis that using a fixed wire to support the weight of the head could reduce fatigue in the neck and shoulder muscles. The emphasis was on this determination rather than a statistical analysis.
For the biomechanical analysis of this experiment, the study conducted by Hasraj et al. [41] indicates that the load imposed on the cervical spine dramatically increases when flexing the head forward at varying degrees. An adult head typically weighs about 10 to 12 pounds in the neutral position. As the head tilts forward, the forces seen by the neck surge to 27 pounds at 15 degrees, 40 pounds at 30 degrees, 49 pounds at 45 degrees, and 60 pounds at 60 degrees. Figure 4a presents a static analysis using a free-body diagram of a human head, centered at G when the neck is flexed. This diagram is a simplified model of the human head-neck posture, illustrated as an inverted pendulum that rotates with respect to C7 vertebra. The moment balance equation of the free body diagram is given as:
Fig. 4
Biomechanical analysis of the effects of wire support. a Free body diagram showing the wire support acting on the neck and head, b wire tension during the feasibility test, and c variation in cervical spine load with changes in the wire supporting angle
$$Rcos\text^\circ \text_^\circ )\left\_^\circ )\right\}-Rsin\text^\circ \text_^\circ )\_^\circ )\}-ry= 0$$
(1)
where R is the distance between C7 and the center of mass of a human head, m is a mass of a human head, g is the gravitational acceleration, x is the tension of the cable, θ1 is a head-tilt angle change from neutral configuration, θ2 is an angle in which the cable is pulled, r is a moment arm of splenius capitis, and y is a muscle load to cervical spine. In our calculations, the value of R has been set to 160 mm, following the recommendation in ref. [41]. The weight, mg, is set to 60 N, which corresponds to the average mass of a human head. The variable x has been assigned a value of 4.9 N, representing the average force measured at the load cell during the feasibility test, as shown in Fig. 4b. θ1 is given a value of 45°, which is the head tilt angle. The extra angle of 10° was assigned to account for the natural angle of the cervical spine at a neutral configuration. This angle value also corresponds with the 10–12 pounds of weight on the spine at a neutral configuration, as mentioned in ref. [41]. θ2 was between 15 and 30 degrees during the experiment. The value of r has been set to 35 mm, which is the average moment arm of the splenius capitis muscle with respect to C7, referring to ref. [42]. With values assigned to each variable, y has been derived from Eq. (1). For θ2 less than 45° when the neck flexion angle is 45°, Fig. 4c suggests that the load on the cervical spine to maintain the flexed posture decreases as the angle θ2, at which the direction of cable tension acts, approaches 0 degrees (horizontal direction). However, to set θ2 in the horizontal direction, a long support is required to maintain the tension direction at a high position from the c7 vertebra, making it difficult for the wearable device to fit closely to the body. Therefore, if θ2 is designed to be between 15 and 30 degrees based on these calculation results, it is expected that the load on the cervical spine will be reduced by about 6 to 13 N compared to the case where there is no assistive force from the wire.
Figure 5 presents two plots of moving averaged nRMS and nMDF over time in the feasibility test for UT and SC muscles, using a window size of one minute. The values were averaged from 4 subjects. The nRMS and nMDF at the initial state were calculated based on the average nRMS and nMDF of 30 s immediately before the start of the 15-min experiment in a neutral head posture. Data from left and right muscles were averaged since our experiment did not involve lateral bending of head-neck motion.
Fig. 5
Changes of neuromuscular parameters over time in the feasibility test for UT and SC muscles. a Normalized RMS and b normalized MDF. The values were averaged from 4 subjects
The results of Fig. 5a show that the nRMS (% MVC) for both the UT and SC muscles exhibit similar trends regardless of the presence or absence of wire support. At the endpoint (15 min), the nRMS for UT and SC muscles were 4.37 ± 5.19% MVC and 11.23 ± 12.21% MVC in the case without wire support and 5.13 ± 5.83% MVC and 9.94 ± 8.64% MVC in the case with wire support, respectively. On the other hand, Fig. 5b clearly shows the substantial improvement in the nMDF (%) for the UT and SC muscles when wire support was used. At the endpoint, the nMDF for the UT and SC muscles were 80.04 ± 12.82% and 90.36 ± 2.14% in the case without wire support and 104.56 ± 22.37% and 95.20 ± 6.45% in the case with wire support, respectively. This significant increase in nMDF indicates that the wire support effectively mitigates muscle fatigue, underscoring its potential benefits for ergonomic improvements.
Design of the neck supporting exosuitBuilding on the results of the feasibility test, where the wire support effectively reduced muscle fatigue, a new exosuit has been designed to incorporate this support method in a more wearable and intuitive form. As shown in Fig. 6, the exosuit primarily consists of four main components: a clutch, a vest, a neck brace, and the same headgear used in the feasibility test. The clutch is employed as a locking mechanism to hold a wire connected to the headgear, enabling the maintenance of a flexed neck posture [43]. The mechanism consists of a spool with wire wound around it, a ratchet, and a tape spring, all of which share the same concentric axis and are connected to the spool. Additionally, there is a pawl that can engage with the ratchet, a push–pull solenoid actuator (ROB-11015, Sparkfun, USA) that can drive the pawl, and an incremental rotary magnetic encoder (RMB20, RLS®, Slovenia) that is positioned at the top of the clutch to detect the spool's rotation, allowing for the measurement of the change in wire length. The clutch is attached to the backside of the vest, which is made of non-stretchable fabric to prevent undesired movement caused by wire tension. The 3D-printed rigid neck brace has been meticulously designed to precisely conform to the contours of the neck and shoulders. Its primary function is to prevent the shift of vest around the shoulder axis caused by the tension from the wire. The wire connected to the clutch is linked to a moving pulley, while another wire, with its ends anchored to the left and right sides of the head via magnet holders, passes through a wire separator and is connected to the moving pulley. This functionality allows users to turn their head left and right even when the clutch locks the wire in a flexed neck position. The clutch is controlled by an STM32 microcontroller (NUCLEO-L432KC, STM Microelectronics, Denmark) and powered by a 7.4 V, 900 mAh battery, enabling the device to operate for 9 h. The total weight of the exosuit, including the head gear and battery, is 975.5 g, and the time required to wear the exosuit alone is less than 30 s (see Supplementary Movie 1).
Fig. 6
Exosuit system components
The exosuit can control the clutch lock based on the user's head movement (see Supplementary Movie 2 and 3). If users flex their head and remain still, with no change in wire length for 3 s, the encoder detects this stationary state as a triggering signal. The solenoid actuator then pushes the pawl, engaging the ratchet and locking the wire spool connected to it. This action limits wire movement, and users can relax their posterior neck muscles by relying on the wire tension for support. To release the locking mode, the user only needs to raise their head to loosen the wire tension. The ratchet will rotate in the opposite direction due to the restoring force of the tape spring, disengaging the pawl. As a result, the wire can move freely again.
Experimental setupExperimental designThe independent variable for the static posture task was the exosuit intervention, which had two conditions: performing the task (1) with (w) the exosuit, and (2) without (wo) the exosuit. The dependent variables were the change in the normalized median frequency (nMDF), root mean square EMG normalized by MVC (nRMS), and their change over time throughout the experiment. In addition, we conducted a qualitative evaluation of the exosuit based on participant feedback according to the system usability scale (SUS). The SUS, developed by John Brooke in 1986, is a widely-used, simple, and reliable tool for evaluating the usability of a wide range of products, offering quick and clear insights with minimal resources [44]. Its versatility, ease of use, and standardized evaluation make it invaluable in usability research worldwide [45].
Experimental protocolThe experimental tasks were composed of three distinct tasks: (1) MVC measurement to normalize muscle activities, (2) a static neck-flexed posture task for 15 min to evaluate fatigue alleviation, and (3) the same task as (2) after a 3-h intermediate break. The 15-min duration set for this experiment was determined based on the consideration of whether participants, equivalent to the general public, could complete the experiment without giving up due to physical fatigue. For tasks (2) and (3), participants were randomly assigned to wear the exosuit during one task (w) and to perform the other task without it (wo). Prior to the “w” task, a 5-min training session was conducted to familiarize the subjects with the exosuit. Following this training, a 30-min break was implemented to prevent the accumulation of muscle fatigue before the “w” case. In tasks (2) and (3), participants were instructed to stand in front of the desk at a designated location, as can be seen in Fig. 7. Subsequently, the angle measured by the IMU sensor in the headgear was initialized to zero while the subject's head was in a neutral posture. After the zero-angle calibration, the laser pointer in the headgear was turned on, and subjects flexed their neck at a 45-degree angle. The 1.5 (width) × 5 (length) cm sized tape was attached to the location where the laser was pointing on the table.
Fig. 7
Experimental setup with the participant wearing the exosuit
After the preparation, subjects were asked to stand still with a neutral head posture for one minute to ensure stable sEMG sensor attachment and to measure the average EMG data at neutral position. Then, the subjects flexed their neck at a 45-degree angle and were verbally reminded to keep their backs and shoulders straight while only flexing their head. Subjects were then asked not to move and to keep the laser point within the tape for 15 min. During the experiment, the real-time output of the neck flexion angle was monitored. If a subject tried to deviate from the 45-degree angle, the experimental assistant guided the subject to return.
Study descriptionA brief description of the study was provided, and informed consent was obtained from participants upon arrival at the lab. This step was followed by researchers gathering anthropometric data (age, weight, stature, and BMI). Subjects were then asked to change into the provided clothing for ease of sEMG sensor attachment. Subsequently, they were seated on a chair while their skin, on which the target muscles were located, was shaved and sanitized with alcohol for sEMG sensor attachment. Following the sEMG sensor attachment, task (1), measuring MVCs for the muscles of interest, was performed. If task (2) was a “w” case, subjects were trained to use the exosuit before a 5-min break. If it was a “wo” case, subjects were given a break immediately after the task (1). After task (2), a 3-h break was given before task (3). If task (3) was a “w” case, the exosuit training was conducted during the break, at least one hour before the break ended, with a duration of 5 min. Upon completion of task (3), subjects carried out the SUS evaluation and a user experience survey to assess the neck assist exosuit's usability.
Statistical analysisStatistical analyses were conducted using the IBM SPSS Statics program to compare and evaluate the changes of nMDF and nRMS in the UT and SC muscles with and without the exosuit. The RMS and MDF data from the experiment were normalized by MVC and averaged MDF for an initial 1 min in a neutral head posture, respectively. The normality of each normalized dataset was assessed using the Shapiro–Wilk test. Since each comparison was made using measurements from the same subject (“w” and “wo”), the paired samples t-test was utilized to evaluate the effect of the exosuit for data satisfying normality. In contrast, the Non-parametric Wilcoxon signed-rank test was used for data violating normality. The significance threshold was set at α = 0.05, indicating that a p-value below this threshold was considered statistically significant.
留言 (0)