
記住我




By periodically arranging customized artificial microstructure units, mechanical metamaterials have extraordinary properties that do not exist in natural materials. Typical mechanical metamaterials include stiffness designable metamaterials,[1, 2] pentamode metamaterials,[3-6] negative Poisson's ratio metamaterials,[7-9] negative thermal expansion (NTE) metamaterials,[10-12] and the origami or kirigami based metamaterials.[13-16] Benefitting from their superior properties, mechanical metamaterials have been used in various research and engineering fields. For example, the multi-stable mechanical metamaterials were able to customize the stress–strain curves of multiple common materials like silicone foam composite, aluminum foam, and silk scaffold only through in situ switch.[17]
In recent years, stimuli-responsive materials with unique properties and performances emerge rapidly, which provides new opportunities for the development of mechanical metamaterials. The most commonly used stimuli-responsive materials include shape memory polymers (SMPs), liquid crystal elastomers (LCEs), hydrogels, and some other composites. If the mechanical metamaterials are reconstructed by replacing the conventional materials with stimuli-responsive materials, they will be able to react to the stimuli of external physical fields, such as, heat,[18-20] chemicals,[21, 22] light field,[23, 24] electric current,[25, 26] magnetic field,[27-29] and pressure action.[30, 31] When stimulated, the metamaterials can automatically deform, make motions, and change their structural properties or functions according to external environments, which thus can be named active mechanical metamaterials (AMMs). To make full use of the unique advantages of different material systems, researchers will select the appropriate stimuli-responsive materials according to different and application requirements. For example, LCEs with good thermal-responsive characteristics often serve as actuators or artificial muscles, and the morphing of LCE productions could be remotely controlled by changing the ambient temperature.[32, 33]
Compared with the conventional mechanical metamaterials, AMMs added an additional dimension of time, and the structural performance becomes dynamically adjustable. Not only the artificial internal structures but also the stimuli-responsive materials play a role during the functioning of AMMs. If implanting a set of elaborately designed energy transfer and storage mechanisms into the metamaterials, the metamaterials would behave “smart,” and realize various functions comparable to the activity of life-like bodies. Based on this principle, a large number of new functions could be extended such as, active shape-shifting,[34-36] programmable mechanical properties,[37-39] elastic wave propagation control,[40, 41] and mobility.[42-44] AMMs is an emerging subject that continues to develop with mechanical design and material science, and has huge application prospects in engineering and science. For one thing, the construction of the AMMs structures are based on the general mechanical principles. For another, the properties of the component stimuli-responsive materials determine the functions and applicable fields of the AMMs. These two contents are of great importance for AMMs. But currently, reports considering both of these two aspects are limited. It is necessary to discuss the mechanical construction principles and the classifications based on the stimulus fields, along with the most advanced technology, research results, and engineering applications of AMMs.
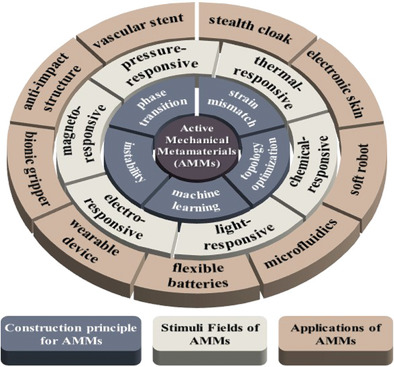
In this review, the discussion will be divided into three parts, as shown in Figure 1 (from inner to outside). We will start with the mechanical construction principles of active metamaterials, that is, 1) phase transition, 2) strain mismatch, 3) mechanical instability, 4) topology optimization, and 5) machine learning. The second part classifies AMMs according to stimulus fields and comprehensively reviews the research progress of each branch direction, that is, 1) thermal-responsive AMMs, 2) chemical-responsive active AMMs, 3) light-responsive AMMs, 4) electro-responsive AMMs, 5) magneto-responsive AMMs, and 6) pressure-responsive AMMs. Of course, these do not represent all types of stimuli-responsive materials. With the development of material science and physics, new alternative stimuli-responsive materials would emerge in the future. In the third part, we summarize several representative functions of mechanical metamaterials and their practical applications. They can be used in various fields such as miniaturized systems,[45] huge machinery,[46] and aerospace structures.[47] Compared with previous mechanical metamaterials, AMMs possess more design flexibilities, pre-stress design realizability, mechanical properties programmability, multi-stimulus fields coupling driving characteristics, and so on. It can be expected that AMMs will play a more important role in manufacturing and human life.
 Summary of active mechanical metamaterials, their construction principles, classifications, and applications. Primary applications of AMMs are listed, including: a) Stealth cloak.[48] Copyright 2014, Nature Publishing Group. b) Electronic skin.[49] Copyright 2019, Wiley-VCH. c) Soft robot.[50] Copyright 2020, Wiley-VCH. d) Microfluidics.[28] Copyright 2020, Nature Publishing Group. e) Flexible batteries.[51] Copyright, 2020, American Chemical Society. f) Wearable devices.[52] Copyright 2019, Nature Publishing Group. g) Bionic gripper.[53] Copyright 2020, Wiley-VCH. h) Anti-impact structure.[46] Copyright 2020, American Association for the Advancement of Science. i) Vascular stent.[54] Copyright 2018, Wiley-VCH.
2 Construction Principle for Active Mechanical Metamaterials
2.1 Mechanical Construction Principle
2.1.1 Phase Transition
Summary of active mechanical metamaterials, their construction principles, classifications, and applications. Primary applications of AMMs are listed, including: a) Stealth cloak.[48] Copyright 2014, Nature Publishing Group. b) Electronic skin.[49] Copyright 2019, Wiley-VCH. c) Soft robot.[50] Copyright 2020, Wiley-VCH. d) Microfluidics.[28] Copyright 2020, Nature Publishing Group. e) Flexible batteries.[51] Copyright, 2020, American Chemical Society. f) Wearable devices.[52] Copyright 2019, Nature Publishing Group. g) Bionic gripper.[53] Copyright 2020, Wiley-VCH. h) Anti-impact structure.[46] Copyright 2020, American Association for the Advancement of Science. i) Vascular stent.[54] Copyright 2018, Wiley-VCH.
2 Construction Principle for Active Mechanical Metamaterials
2.1 Mechanical Construction Principle
2.1.1 Phase Transition
Phase transition refers to the changes of the material microstructures when the external field (such as, temperature, external force) continuously applies to the material until a specific condition, and the effect is always accompanied by the physical and mechanical changes. The most common phase transition phenomenon is the mutual transformation of materials between the solid phase, liquid phase, and gas phase. In the process of phase transition, the molecular level interactions between each part of the constituents make the whole material undergo a series of changes in properties or deformations. Therefore, the phase transition phenomenon is essentially the reconfiguration of the microstructures inside the material. And the changes in mechanical properties and shape memory effect caused by phase transition effect could be utilized as the construction method for a large class of AMMs. SMPs, LCEs, hydrogels, and magneto-responsive materials based on the principle of phase transition are commonly used in AMMs. In this section, we would focus on the mechanical construction principle and take the most representative thermal-responsive SMPs for example to review the progress.
SMPs are active materials that can change their shapes from the original shape to a temporary shape when exposed to a thermal stimulus.[55] In 2006, Liu et al.[56] simplified the classic thermos-mechanical model and raised an assumption that the SMPs were composed of hard frozen phase and soft active phase. The frozen phase locked (stored) the conformational rotation corresponding to the high temperature entropic deformation. On the contrary, the active phase allows localized free conformational motions. The volume fraction of the two phases was the function of temperature. By changing the ambient temperature, the ratio of the two phases could be adjusted and the required mechanical properties could be obtained. But this theory could not offer a good explanation for the time-temperature equivalence of polymers.[57] Furtherly, Qi et al.[58] developed a three-phase-transition theory that combining the advantages of the viscoelastic theory and phase transition theory, giving a more accurate constitutive model for SMPs. SMPs are used to make actuators due to their reversible thermal actuations. Behl et al.[59] prepared temperature memory polymer actuators (TMPAs) with a temperature-memory effect for a long time. The actuators were able to undertake more than 250 cycles of thermal control actuation with the performance of the TMPAs rarely changed. Farhan et al.[60] used SMPs to design a thermal response actuator with twisted shapes. With the change of the temperature, the actuator would be reversibly switched in continuous angles to indicate the temperature changes. Utilizing the strategies of structural design, many metamaterials with special functions are produced. Zhao et al.[61] design lattice metamaterials with dual morphing modes. The structures were assembled by pre-arranged soft phase and hard phase. At low temperature, the mechanical properties were decided by the whole zig-zagged structures, and at high temperature, the thermal-soften phase would symmetrically buckle under pressure and resulted in the second deformation mode (Figure 2a). Jin et al.[62] developed an origami robot with SMP networks. As Figure 2b shows, the bird-like robot could be adjusted to various predesigned postures with the change of the temperature. Yuan et al.[18] utilized a flexible elastomer and a relatively stiff polymer to fabricate new lattice architectures. As the temperature increased, the modulus of the amorphous polymers would decrease due to the glass phase transition, and then triggering a two-stage pattern switching of the whole lattices (Figure 2c). Yuan et al. developed some pattern switches through predesign the layouts of the two components. Similarly, Chen et al.[63] assigned different SMPs into conventional auxetic lattice configuration to gain the multilevel metamaterials, which could be used to embedded the wearable devices. In addition to the SMPs materials, some other special structures have also been developed, which achieved phase transition effect not from the materials but the structural configuration itself. Such as the interesting solid-solid phase transformation effect in the specially designed microstructures.[64-66] Wang et al.[67] utilized the principle of jamming phase transition to fabricate a novel fabric (Figure 2d). When pressure was exerted on the boundaries of the chain mails, the internal units would interlock and change the properties of the structures.
 Metamaterials based on phase transition principle. a) Compression behaviors of the 2D metamaterials with the different material layout at 25 and 70 °C.[61] Copyright 2019, American Physical Society. b) Reversible actuation of the bird-like robot.[62] Copyright 2018, American Association for the Advancement of Science. c) The programmable deformation of the smart window under temperature changing.[18] Copyright 2018, Wiley-VCH. d) Two layers of the chain-mail fabrics in the soft state.[67] Copyright 2021, Nature Publishing Group.
2.1.2 Strain Mismatch
Metamaterials based on phase transition principle. a) Compression behaviors of the 2D metamaterials with the different material layout at 25 and 70 °C.[61] Copyright 2019, American Physical Society. b) Reversible actuation of the bird-like robot.[62] Copyright 2018, American Association for the Advancement of Science. c) The programmable deformation of the smart window under temperature changing.[18] Copyright 2018, Wiley-VCH. d) Two layers of the chain-mail fabrics in the soft state.[67] Copyright 2021, Nature Publishing Group.
2.1.2 Strain Mismatch
Strain mismatch refers to the discontinuous changes of strain in medium, often occurring in architectures composed of two or more different kinds of materials. Due to the different mechanical properties, the uncoordinated strain of each part results in internal stress at the interface under the effect of environmental or load conditions, which furtherly lead to the bending or deformation of the structure. Based on this, metamaterials with active deformation and controllable response could be realized through subtle materials deployment. The study about strain mismatch could be traced back to the early 20th century. In 1925, the thermal deformation of a bi-metal beam that composed of two kinds of materials with different thermal expansion coefficients was discussed by Timoshenko.[68] The author obtained the deformation and buckling curvature, which laid the foundation for the study of strain mismatch. Later, some researchers studied the mechanical principle of strain mismatch in different conditions. Kim et al.[69] derived the mechanical behavior model of a microcantilever with deposition of another material on it. In their calculation, the problem was considered as the strain mismatch of a double-layer beam. In another application background, Xiao[70] studied the strain mismatch problem of bilayer gel structures. In recent decades, most researchers mainly focus on how to utilize the effects of strain mismatch to provide the metamaterial with appropriate and controllable deformation. There are mainly two kinds of construction principle based on strain mismatch effect, namely, the strain mismatch phenomenon caused by temperature effect and the ones caused by swelling and deswelling effect.
A typical design strategy is to combine the materials with different thermal expansion coefficients into composite beam. When the temperature increases, the side with high thermal expansion coefficient generate a larger strain, which makes the composite beam bend toward the side with low thermal expansion coefficient. Therefore, the strain mismatch principle is very suitable for realizing the transformation of dimensions. Ding et al.[71] combined materials (glassy polymer and elastomer) with different thermal expansion coefficients to form a composite rod which was able to transform from a 1D rod to 3D structure. Tian et al.[72] reported a Gaussian-preserved shape-morphing system with VO2 nano-membrane and strip-shaped Cr layer. When the system was stimulated by a force or thermal stimuli, it would transform from 2D flat shape into 3D rolled shape. Due to the fast response characteristics of VO2, the shortest response time of the system could reach 4.5 µs. In addition, unconstrained homogeneous materials generally yield uniformly expansions or contractions as the temperature rises or falls, which corresponds to a positive coefficient of thermal expansion. Once the concept of composite structural design was introduced, the structure with NTE property could be generated from the materials with positive coefficients of thermal expansion. Wu et al.[11] utilized the deformation characteristics of anti-chiral negative Poisson's ratio structure (Figure 3a) to design and prepare AMMs. When the temperature rose, the structure contracted because of the composite ligaments’ bending. The innovation point of this work was that they developed the conventional 2D anti-chiral metamaterials into 3D configuration, to achieve an overall NTE. Ni et al.[73] achieved the control of the thermal expansion tensors of the structure in combination with the serpentine lattices of six ligaments, and transformed the 2D architecture to a 3D curved surface by adjusting the combination forms between different materials, as is shown in Figure 3b. Different from the construction principle that combining diverse materials into composites, Guo et al.[74] designed metamaterials inspired by the kirigami microstructure, achieving giant tunable positive and NTE. The active metamaterials could effectively transform the thermal mismatch into colossal expansion or contraction force, as shown in Figure 3c. Also based on these kirigami metamaterials, Yu et al.[75] furtherly performed mechanical designs, theoretical predictions, and experimental demonstrations to complemented this work.
 Metamaterials based on strain mismatch. a) NTE metamaterials that composed of different thermal expansion coefficient materials.[11] Copyright, 2016, American Chemical Society. b) 3D adjustable thermal expansion deformation.[73] Copyright 2019, Wiley-VCH. c) Kirigami structures with positive expansion effects.[74] Copyright 2021, Wiley-VCH. d) Hydrogel-driven helical structure.[76] Copyright 2013, Nature Publishing Group. e) Soft mechanical metamaterials with negative swelling behavior.[77] Copyright 2018, American Association for the Advancement of Science.
Metamaterials based on strain mismatch. a) NTE metamaterials that composed of different thermal expansion coefficient materials.[11] Copyright, 2016, American Chemical Society. b) 3D adjustable thermal expansion deformation.[73] Copyright 2019, Wiley-VCH. c) Kirigami structures with positive expansion effects.[74] Copyright 2021, Wiley-VCH. d) Hydrogel-driven helical structure.[76] Copyright 2013, Nature Publishing Group. e) Soft mechanical metamaterials with negative swelling behavior.[77] Copyright 2018, American Association for the Advancement of Science.
Similar to the mechanical construction principle based on thermal strain mismatch effect, the utilization of swelling mismatch effect is another design strategy to AMMs. Water-responsive hydrogels are a kind of typical hydrophilic polymer materials, which exhibits obvious deformations when absorbing or losing water.[78, 79] According to this property, many researchers have developed AMMs with special deformation modes. Wu et al.[76] alternately arranged two kinds of hydrogel stripes with different shrinkage and elastic modulus at the certain angles, to prepared a planar sheet structure. Due to the internal stresses in the NaCl solution, the products were able to realize self-driven spiral bending deformation in accordance with the pre-set mode (Figure 3d). Mao et al.[80] demonstrated a periodical macrostructure that was able to realize self-folding and unfolding process by combining hydrogels with the SMPs. The hydraulic swelling force of hydrogels resulted in morphing, and the SMPs would be used to regulated the rate of morphing. Though stiffness and deformation of the hydrogels are relatively easy to be controlled, the ductility and flexibility of the hydrogels are weak. And these two problems are challenging in the scientific research of hydrogels.[79] Zhang et al.[77] demonstrated a reversible component design: employing the polymers as the substrate, the perforated elastomer as the cover layer, and the hydrogels as fillers, as is shown in Figure 3e. The strip shaped units were assembled into a negative swelling networks with hexagonal chiral honeycomb configuration. And the experiment showed that the metamaterials could reach a large negative swelling ratio up to 98%. With a similar design strategy, Chen et al.[81] applied the swelling strain mismatch to origami structures, and developed AMMs with positive, negative, and zero swelling behavior. But in this work, the layer is thin. When the metamaterials undertook multiple driving deformation, the local deformation tended to be imbalanced due to the thin, delicate encapsulation, and leading to the uniformity of overall structural deformation. In addition, the reaction time of AMMs based on swelling strain mismatch design is relatively long. Therefore, this design scheme is not suitable for cases that requiring rapid response.
2.1.3 InstabilityTraditionally, the design of engineering structures aims to avoid the instabilities to ensure safety. But in recent decades, researchers turned to take advantage of various instabilities to design novel structures and metamaterials. The mechanical construction based on instability mainly includes two aspects: 1) The instabilities in microstructured materials, which is of the micro scale, and 2) the structural instabilities, which is of a macro scale.
Petryk[82] systematically summarized the material instabilities in elastic materials and plastic solids, which built a theoretical framework for the studies and metamaterials design based on the microstructured materials instabilities. Kochmann et al.[83] regarded the composite materials as the combination of several phases. The homogeneous linear elastic phases had positive-definite moduli, while the phases with nonpositive-definite elastic moduli had negative stiffness. These constituents were temporarily stable due to their mutual constraints. Nonconvex potential energy landscape was the key to understand the material instabilities. According to the principle of minimum potential energy, microstructured materials tended to be arranged with the energy-minimizing sequence. The materials with non-convex energetic potentials would skip the uniform deformation and rapidly jump to the position with low potential energy, which exhibiting macroscopic instabilities including phase transformations, domain patterning, strain localization, etc. Consequently, the core of the material-instability-based metamaterial design is to controlling the number of the minimum potential energy points of the materials, and the time when the minimum potential energy points appear during the loading process. Li et al.[84] focused on the elastic instabilities in common soft materials, discussing the progress in soft porous materials, heterogeneous multiphase and fiber composites. They also explained the effect of post-buckling in the various mechanisms of instabilities. Viard et al.[85] studied the propagations of instability in different 2D lattices that were respectively bending-dominated and stretch-dominated. Through the experiment, they proved that the initiation and propagation of instabilities could be controlled by the microstructures, which provided the reference for more material-instability-based metamaterials.
Structural instability refers to the phenomena that the structure loses its stable state when the applied load increases to a threshold value. If the load continues to increase by a small increment, the deformation will rapidly increase and accelerate the failure of the structure. Common elastic instabilities include, for example, structural curving, buckling, twisting, wrinkling, folding, and indentation, etc. These large deformations and rotations result in large pattern transformations and mode switching of the structures, which could be widely utilized for the design of structural-instability-based metamaterials. Janbaz et al.[86] bonded two kinds of materials with respectively hyperelastic and viscoelastic properties to prepare composite beams, which showed different deformation modes with the change of strain rates. Based on this, they used a predictable analytical model to explain the instability of the beams and constructed the complex strain rate-dependent systems (Figure 4a). Among previous works, structural instability has played an important role in guiding the design of various multi-stable structures.[87] Tao et al.[39] combined the two kinds of SMPs in a corrugated configuration to obtain the additional thermal response effect. When the ambient temperature increased, the relatively weak SMP layers buckled under the compression load while the strong layers maintained their shapes, resulting in regular multi stable states. Hence the deformations and recovery modes of the structures could be switched and pre-programmed. Based on structural instabilities, various porous metamaterials have been developed,[88-92] as shown in Figure 4b. The shapes and sizes of the micro-holes were controlled by geometric constraints or loadings on the laterals, which had a huge impact on the materials. Therefore, multiple characteristics of the materials, such as, the failure modes, mechanical properties, propagating elastic waves, and the discontinuous buckling could be adjusted flexibly. Besides, thin elastic shells show significant unstable post-buckling stage with the continuously increasing external load. Marthelot et al.[93] discussed the instability process of a pneumatic elastic thin shell with pre-designed patterned surface. Due to the constrained buckling design, the structure would gradually lose the state of stability as the pressure decreased, and reticulated networks of sharp ridges emerged on the surface of the shell. Snap-through is a common design strategy based on structural instability,[31, 94-97] and it was usually used to produce mechanical metamaterials with multiple stable states. Most snap-through metamaterials are constructed using the instability of elastic beams. Fu et al.[94] attempted a novel approach by wrapping the granular particles with membrane to generated designable instabilities. These metamaterials with typical zig-zag force-displacement curves and tunable peak forces also showed good energy absorption capacity. Based on structural instabilities, pre-strain design strategy[98-103] inspired a large class of metamaterials. Yan et al.[101] designed an autonomic 3D structure using the mechanism of buckling effect of the 2D precursor. The spatial variation of thickness of the 2D structure was preset and attached to the substrate. When the pre-stretched elastomer substrate was released, the structure could flexibly transform from 2D configuration to expected 3D configuration (Figure 4c). Based on this idea, Yan[102] and coworkers extended this concept to multilayer and multi-material mesostructures and furtherly designed 3D near-field communication devices.
 Metamaterials based on mechanical instability. a) Buckling deformation of double beam sensitive to strain rate.[86] Copyright 2020, American Association for the Advancement of Science. b) Porous metamaterials with tunable mechanical behaviors.[90] Copyright 2014, American Physical Society. c) 2D to 3D transformation process of soccer-shaped active metamaterials.[101] Copyright 2016, Wiley-VCH. d) Bionic self-folding flap robot based on mechanical instability principle.[104] Copyright 2020, American Association for the Advancement of Science. e) The crawling of the python like robot with kirigami skin.[31] Copyright 2019, National Academy of Sciences.
Metamaterials based on mechanical instability. a) Buckling deformation of double beam sensitive to strain rate.[86] Copyright 2020, American Association for the Advancement of Science. b) Porous metamaterials with tunable mechanical behaviors.[90] Copyright 2014, American Physical Society. c) 2D to 3D transformation process of soccer-shaped active metamaterials.[101] Copyright 2016, Wiley-VCH. d) Bionic self-folding flap robot based on mechanical instability principle.[104] Copyright 2020, American Association for the Advancement of Science. e) The crawling of the python like robot with kirigami skin.[31] Copyright 2019, National Academy of Sciences.
In nature, buckling instabilities are widespread and mostly appear in the form of membrane structures. Such as the growth processes of plant leaves,[105-107] the ladybird beetle flapping wings,[104] the predatory action of flytrap,[108] the skin of snakes,[31, 97] etc. Those examples provide inspiration for structural design, especially the design of soft robots. Huang et al.[106] studied the physical process of plant leaves growth and revealed that the morphological transition process was driven by the instability effect caused by the differential growth of each part of the tissues. Baek et al.[104] imitated the structure of ladybird beetle wings to design a soft flying robot. When it folded, the elastic energy was stored on the deformed facet and realized self-locking; and this energy would release to make the robot rapidly deploy within 116 ms. This self-locking and self-deployment ability provide an extremely high load-bearing capacity in flight (Figure 4d). Inspired by the bistablility and developability of the Venus flytrap leaves, Kim et al.[108] presented a soft robot with the ability to rapid and large morphing movements. Inspired by the snake crawling and kirigami, Rafsanjani et al.[31, 97] designed some python-like robots with kirigami shells. When the pneumatic cylindrical shell stretched (Figure 4e), the flat surface would transform into a 3D-textured surface and gripping the ground to generate friction. The phase transition characteristics could be controlled by presetting the geometry of the cut and curvature of the kirigami skins.
2.2 Simulation and Data-Driven MethodsIn addition to the mechanical construction principle and experimental testing strategies for the design of metamaterials, with the development of computer science, computer aided design and computer aided engineering have played more and more important roles in the development of metamaterials. At the beginning of the metamaterial design, numerical simulation could effectively predict the feasibility of the design scheme. During this design process, data-driven artificial intelligence and other methods could be used to shorten the design cycle by training the computational model with experimental data, and thereby improve efficiency. When experiments were completed, the experimental results could be checked by simulation. Therefore, simulation and data-driven methods are becoming more and more indispensable in the design of metamaterials.
2.2.1 Structural OptimizationStructural optimization generally includes size optimization, shape optimization, topography optimization and topology optimization. Among them, topology optimization implies arranging the distribution of the materials to obtain the desired performance of the structure within the specified design domain.[109] The main idea of the topology optimization method in mechanics is to express various mechanics indexes of the structure as a function related to the material distribution, and establish optimization algorithms with constraints to find the optimal solution, and finally optimize a specific performance of the material. Such as ultra-lightweight and high-strength advanced structures.[110] By now, the topology method has developed tremendously and has been used in the design of the AMMs. Sigmund et al.[111] utilized numerical topology method to create metamaterials with positive, zero and NTE coefficients. Here, the topology method guided the distribution of the matrix phase and the void phase, and thus minimizing the objective function. Wang et al.[112] established a bi-objective optimization to model to design active metamaterials with directional thermal expansion functions and high stiffness. Furthermore, Wang et al.[113] fabricated multifunctional metamaterials. They evaluate the effective properties of the microstructures with numerical homogenization method and evolve the boundaries with the level-set optimization method. Geiss et al.[114] proposed a density topology optimization method for 4D printed structures. Clausen et al.[115] prepared a series of architectures with programmable Poisson's ratio under large deformations. The topology optimized nonlinear configuration turned out to be more stable than the traditional linear configuration, and the Poisson's ratio of the nonlinear configuration kept constant as the strain changed from 0 to 0.2.
2.2.2 Machine LearningTraditionally, the emergence of new mechanical metamaterials is generated through a large number of mechanical experiments and numerical simulations, which often depend on the experience of the designers or through trial-and-error. Therefore, previous methods are complicated in experiments, long in the research cycle, and highly cost in development. These disadvantages are exactly what machine learning is good at solving. In recent years, introducing machine learning into the design of metamaterials has become a new research hotspot. In general, machine learning refers to the process of instructing the computer to obtain an appropriate model based on existing data. The existing experimental and simulation data could be organized as the results database. Then they selected proper algorithm model to establish the relation of the input parameters (such as, types of materials, micro-architectures, etc.) and output parameters (such as, stiffness, flexibility, compressibility, etc.). After being trained by large amounts of data, the obtained model can predict the properties of metamaterials or tailor the micro-architectures for metamaterials according to external conditions. So the current challenging problems in the design of AMMs are likely to be solved through machine learning. Hamel et al.[116] reported a kind of active composite structures based on machine learning. Combining finite element method and evolutionary algorithm, the target shape shifting responses of the composites could be accurately achieved. Wu et al.[117] introduced evolutionary algorithm into additive manufacturing process. The desired voxel distribution would be obtained after the pre-design evolutionary algorithm iterations terminated, and the motions and curvature distributions under magnetic actuation could be programmed. Machine learning uses computers to mine the potential value from data and learn the objectives’ laws and characteristics. But it should be noted that whether a machine learning model keeps accuracy outside the dataset is always posteriori. So the independent variables should be kept in the training data space to ensure the correctness of the model.
3 Active Mechanical Metamaterials Responsive for Various Stimulus Fields 3.1 The
留言 (0)