
記住我

This study was designed to demonstrate the feasibility of minimal-invasive drilling of screw pathways in the pelvis using an AR surgical navigation system consisting of an off-the-shelf optical-see-through HMD, a surgical visualization software client that runs on the HMD, and a standard surgical toolset for this type of procedure attached to tracking markers (ArUco) [14, 15].
In the classification of health technology assessment (HTA), the presented work assessed the therapeutic reliability and interference of the material in a simulated clinical scenario. The motivation for the assessment can be described as the development of surgical techniques towards minimally invasive procedures and the need for precise image guidance on the one hand and the availability of novel HMDs on the other hand. The system to be assessed and the surgical context and intended use of the system have been described in detail [21, 22].
While the system proved to be robust, with an overall success rate for entry-point navigation of 93.8%, the drop-out rate of 6.2% has to be explained. The few drop-outs resulted from line-of-sight problems and workflow disruptions caused by the oversensitive user interface (UI) of HoloLens 2 (known as wrist tap mode), which could be corrected by software modifications (HoloMA version 1.5.0) [23]. Similar problems have been described by other teams to a comparable extent [24].
Notably, the entry points of screw trajectories that showed larger variation in several parameters (e.g., drill pathways #2 “iliac crest posterior screw,” #6 “iliosacral screw S2,” #7 “transverse supraacetabular screw”) are located in the lateral or dorsal aspect of the pelvis. This 360° orientation of drill pathways in the pelvis of our test setup based on just one registration is technically very challenging compared with a typical clinical setting where the workflow is either anterior/posterior, posterior/anterior, or side to side with the navigation system registered ideally to the respective drilling task. Another reason is the specific slope of the plastic phantoms´ surface in these regions, generating a higher probability of slipping at the entry point. Moreover, slipping can also occur due to missing soft tissue covering in the experimental setting.
Modifications in the registration process towards an optimized point cloud registration need to be discussed separately. In our setting, an optimized surface-matching routine was used (Fig. 4), which will allow transfer to the OR in the future [16].
To be able to compare navigation accuracy, the technical limitations of the system have to be known. In a recent publication, technical specifications of surgical tool tracking with off-the-shelf AR HMDs have been described in detail [24]. Tool tracking accuracy of spherical retro-reflective markers showed superiority compared to ArUco markers for lateral translation, while ArUco markers performed relatively stable in rotation. This limitation has to be accepted in our setup. For translational as well as rotational deviation, our results in the specific clinical setup of pelvic trauma surgery are comparable to other groups using visual guidance for K-wire placement [24]. The use of spherical reflective markers might be beneficial and should be considered.
While results in translational and rotational accuracy can be well explained with the known technical properties of ArUco marker tracking, the screw length achieved is a resulting parameter. The achievable screw length according to intraosseous position has clinical relevance, mainly with respect to the stability of the construct. Too short screws may result in early failure and loosening, e.g., in the case of symphysis plates. Too long screws may lead to penetration of the far cortex and potentially damage neuro-vascular structures. Anchoring of implants is most important in poor bone quality and a significant issue in the development of surgical procedures. Here AR-navigated screws achieved this goal above expectation [25,26,27].
A clinically valuable perforation score for pelvic trauma surgery was described here as the “pelvic screw perforation score (PSPS).” This tool allows the classification of drilled pathways. The perforation risk depends on the anatomic features of the respective pelvic region and the desired diameter of the screw to be placed in that anatomy. Together with the given system accuracy, it can now be determined whether the technique is suitable for the specific surgical task [25,26,27,28,29].
For our setup and the off-the-shelf HMD with HoloMA software, the results of the screw perforation score (Fig. 10) were mostly within the clinically safe range. Theoretically, no neurological or vascular damage has to be expected with screw positions in grade 0–1, which could be achieved within 89% [19, 20].
Fig. 10
Grading of screw trajectories according to Pelvic Screw Perforation Score
Concerning perforation grade 2, the assessment of theoretical risk for critical structures largely depends on the screw trajectory. While for some screws, a cortical perforation of less than 3 mm will not result in neurovascular or organ damage, some screws might cause injury of nerves, e.g. perforation of the sacral ala by iliosacral screw S1 hitting the L5 nerve root or perforation of the S1 foramen with injury to S1 nerve root, or vessels, e.g. injury of corona mortis by perforation of the anterior column screw. Therefore, in the clinical situation, the process of registration must continually be optimized to the respective screw pathway drilled. In this experimental setup, surface registration was done only once per pelvis at the beginning of the experiment and used for all 24 screws, with the reference marker in the left anterior iliac spine.
These results suggest a substantial equivalence in performance with other computer-assisted methods based on intraoperative 3D data and they are superior to conventional techniques and 2D navigation [7,8,9, 30].
Published clinical results from a CT study show high variation in entry point positioning due to 14-38 mm variation in the horizontal plane and 9–15.9 mm in the vertical plane for the entry point in AC column screws [27]. The comparison of translational screw deviation between conventional technique 5.1 ± 3.0 mm, 2D-fluoroscopy based navigation 5.5 ± 3.0 mm, and 3D-fluoroscopy based navigation 4.7 ± 2.5 mm has also been examined before [9]. Malpositioning rates were described as 5–24% with the conventional technique, 2–14% with 2D-fluoro navigation, and 0–5% with CT navigation, respectively [8].
Our results with translational screw deviation for the entry point of 3.99 ± 1.04 mm and 88.7% of screws following PSPS Grade 0 and 1 and 100% following Grade 0–2 prove the strong performance of our concept.
AR-based navigation can build a bridge between pre-and intraoperative 3D scans at discrete points in time, thus avoiding additional radiation exposure for the surgeon and the OR staff. As our study pioneered this technique, time issues were not in focus, but time expenditure seems comparable to conventional navigation systems. There is still a need for matching and tool calibration first. In our experimental setup, we also had a preoperative planning step to measure deviations. The user interface can easily be controlled entirely within the sterile field, and our favorite visualization mode with semitransparent bone visualization enables intuitive navigation with conventional tools and a non-altered workflow.
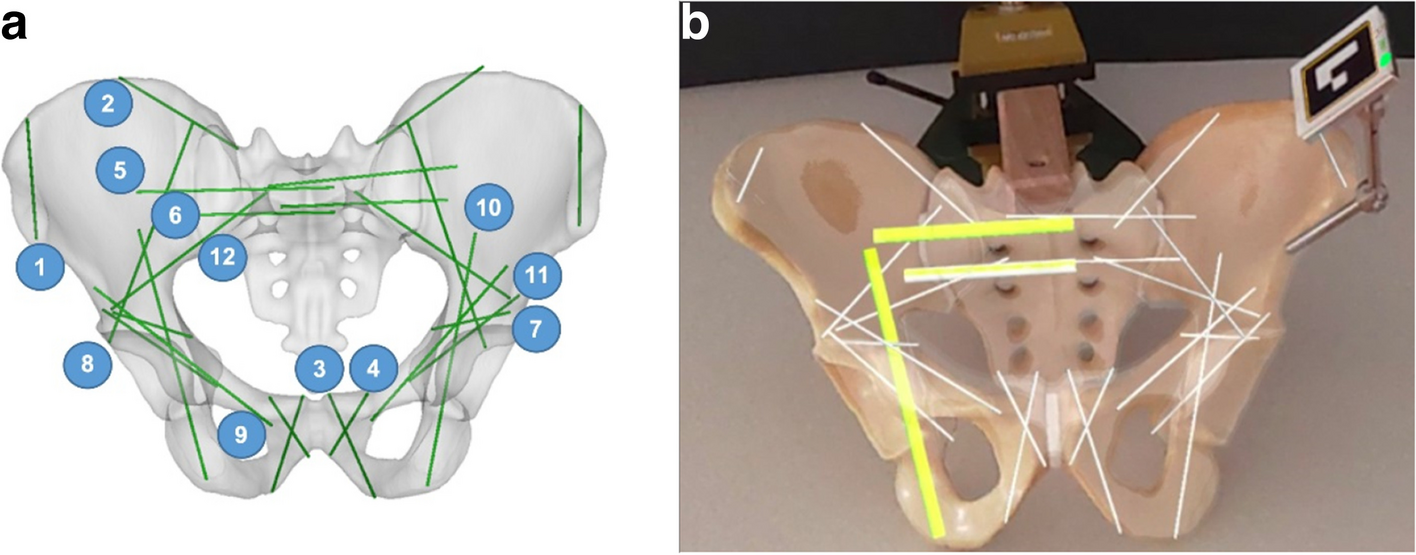
A standard surgical toolset has been used, and the attached markers were designed to be sterilizable. Tools were implemented and calibrated in a fast software routine using a calibration frame directly before surgical navigation. This method allows for maximum flexibility and enables easy adaption of the system to a variety of surgical tasks. In that way, the software has proven to be a powerful tool for the development of specific AR procedures. In our study, a complete set of 24 pathways could be visualized simultaneously, and each drill pathway could also be addressed individually to simplify workflow and support the surgeon’s attention. The most desired visualization mode is 3D navigation in transparency mode, enabling “in-situ”-visualization of a surgical tool trajectory within the 3D anatomy [11, 31].
HoloMA software has a unique multiplayer mode that allows to share one coordinate system and enables cooperation in the virtual space. This specification simplifies not only cooperation in an experimental setup but also facilitates watching of AR procedures. This is an important option that allows us to practice the “shadow surgeon“- concept [32].
A noticeable side effect of 3D navigation is its benefit for teaching and education. Visualizing complex 3D anatomy in the transparency mode helps to generate a good perception of the specific anatomical situation and screw pathways in particular. Training setups with commercially available phantoms can easily be accomplished. The modular structure of the software allows for easy modification and adjustment to different surgical situations and instruments.
Our setup respects many aspects of possible intraoperative use, like workflow, specific surgical instruments, calibration routine and sterilization of components and markers.
The user interface allows sterile control of the complete workflow.
Although our system is nearly ready for clinical use there is still a need for regulation and compliance with oversight bodies.
留言 (0)