


記住我



“We take almost all the decisive steps in our lives as a result of slight inner adjustments of which we are barely conscious.”
—W.G. Sebald.
“Not all those who wander are lost.”
—J.R.R. Tolkien, The Riddle of Strider, The Fellowship of the Ring.
“We shall not cease from exploration
And the end of all our exploring
Will be to arrive where we started
And know the place for the first time.”
—T.S. Elliot, Little Gidding.
Autonomous systems face a fundamental challenge of needing to understand where they are positioned as they move through the world. Towards this end, roboticists have extensively investigated solutions to the problem of simultaneous localization and mapping (SLAM), whereby systems must infer both a map of their surroundings and their relative locations as they navigate through space (Cadena et al., 2016). Considering that these same challenges face any freely moving cybernetic system, natural selection has similarly exerted extensive teleonomical (i.e., illusory purposefulness) optimization in this direction (Dennett, 2017; Safron, 2019b), so generating mechanisms for enabling wayfinding and situating organisms within environments where they engage in multiple kinds of adaptive foraging. Perhaps the most sophisticated of all biological SLAM mechanisms is the hippocampal-entorhinal system (H/E-S), whereby vertebrates become capable of both remembering where they have been, inferring where they are, and shaping where they are likely to go next.
Here, we argue that the development of the H/E-S represented a major transition in evolution, so enabling the emergence of teleology (i.e., actual goal-directedness) of various forms (Safron, 2021b), ranging from governance by expected action-outcome associations to explicitly represented and reflexively modellable causal sequences involving extended self-processes. We focus on the implications of SLAM capacities via the H/E-S, and of evidence that this functionality may have been repurposed for intelligent behavior and cognition in seemingly non-spatial domains. We propose that all cognition and goal-oriented behavior (broadly construed to include mental actions) is based on navigation through spatialized (re-)representations, ranging from modeling abstract task-structures to temporal sequences, and perhaps even sophisticated motor control via SLAM with respect to body maps. Indeed, we would go as far as to suggest that the ubiquity of implicit and explicit spatial metaphors in language strongly points to a perspective in which cognition is centered on the localization and mapping of phenomena within both concrete and abstract feature spaces (Lakoff and Johnson, 1999; Bergen, 2012; Tversky, 2019).
In these ways, we believe Generalized Simultaneous Localization and Mapping (G-SLAM) may provide enactive groundings for cognitive science within the principles of ecological rationality (Todd and Gigerenzer, 2012). That is, we adopt a perspective in which cognition is traced back to its ultimate origins, wherein rationality is understood in terms of adaptations for shaping animal behavior in ways that further evolutionary fitness. Such ecological and ethological connections further provide bridges to optimal foraging theory and (generalized) search processes as ways of understanding cognition as a kind of covert behavior (Hills et al., 2013). While somewhat similar models of intelligence have been proposed (Hawkins, 2021), we suggest these other views may be somewhat misleading in neglecting to account for the central role of the H/E-S for realizing G-SLAM. In addition to providing an accurate viewpoint that grounds cognition in its cybernetic function as shaped over the course of evolution and development, G-SLAM will further allow rich cross-fertilization of insights between cognitive science and artificial intelligence. Given the particular functionalities enabled by the H/E-S, we propose this reverse-engineering project ought to be the central focus of cognitive science and machine learning, potentially constituting the most viable path forward towards realizing AI with advanced capacities for reasoning and planning (Bengio, 2017).
A thorough discussion of these issues is beyond the scope of a single manuscript. However, below we attempt to provide an overview of why we believe the G-SLAM perspective may provide a unification framework for cognitive science. First (in Section “LatentSLAM, a bio-inspired SLAM algorithm”), we review our work on biologically-inspired SLAM architectures for robotics. Then, we consider features of the H/E-S, including its functionality for localization and mapping in both physical and abstract domains. Finally, we discuss correspondences between features of SLAM and core aspects of cognitive functioning. We hope to explain how common principles may apply not only to the fundamental task of finding one’s way to desired locations in physical space, but for thought as navigation through abstract spaces. While much of what follows will necessarily be under-detailed and speculative, in subsequent publications, we (and hopefully others) will explore these issues in greater detail as we attempt to explain fundamental principles in neuroscience and artificial intelligence, while simultaneously seeking synergistic understanding by establishing conceptual mappings between these domains (Hassabis et al., 2017).
In the following section, we provide a high-level overview of LatentSLAM, which is also treated in greater detail in (Çatal et al., 2021a, b). While we believe many of these technical details may be relevant for explaining fundamental aspects of high-level cognition, a more qualitative understanding of this content should be sufficient for considering the conceptual mappings we (begin to) explore in this manuscript (Table 1). Section “The Hippocampal/Entorhinal System (H/E-S)” then summarizes current views on the H/E-S and its functioning in relation to spatial modeling and cognition more generally. Finally, Section “G(eneralized-)SLAM as core cognitive process” draws parallels between understanding in machines (using LatentSLAM) and humans (considering the H/E-S) and propose G-SLAM as a unification framework for cognitive science and artificial intelligence.
TABLE 1
Table 1. Potential correspondences between LatentSLAM, cognitive psychological, and bio-computational phenomena.
We realize that this may be a challenging manuscript for many readers, with some portions focused on describing a robotics perspective, and other portions focused on cognitive/systems neuroscience. Indeed, this article emerged from an ongoing collaboration between roboticists and a cognitive/systems neuroscientist, which has been both rewarding and challenging in ways that demonstrate why this kind of interdisciplinary work is both desirable and difficult. One of our primary goals for this manuscript is to provide a rough-but-useful conceptual scaffolding (i.e., an initial partial map) for those who would attempt such cross-domain research. In this way, interested readers ought not be overly concerned if some of the content is found to be excessively technical relative to their particular background. However, we believe readers who follow through with exploring these suggested mappings (which we only begin to characterize) may be richly rewarded for those efforts.
In brief, G-SLAM can be summarized as follows:
1. It is increasingly recognized that the H/E-S may be the key to understanding high-level cognition.
2. Within the field of robotics, the H/E-S has been identified as having been shaped by evolution for the problem of simultaneous localization and mapping (SLAM) for foraging animals, and where these capacities appear to have been repurposed for navigating through other seemingly non-spatial domains.
3. We believe it would be fruitful to explicitly think of the core functionalities of SLAM systems and test whether these are not just reflected in the functioning of the H/E-S with respect to physical navigation, but with respect to other high-level cognitive processes as well.
If the H/E-S is the kind of gateway to high-level cognition that it is increasingly suggested to be (Evans and Burgess, 2020; George et al., 2021; McNamee et al., 2021), and if it can be well-modeled as having been selected for SLAM functionalities that were later repurposed, then we believe the difficulty of exploring the following material will more than repay the effort of attempting to make the journey. We also ask readers to note places where spatial language can be found, only some of which was intentional. Indeed, we take such linguistic spatializations as supporting evidence for the G-SLAM perspective, which perhaps may be overlooked by virtue of its very ubiquity (cf. fish not noticing water). This is not to say that all spatial cognition points to a SLAM perspective. Yet we believe such spatial mappings are notable in affording opportunities for localization and mapping with respect to such domains. We leave it up to the discernment of our readers to assess how far one can go with following such paths through conceptual spaces, which may not only provide new perspectives on familiar territories on minds, but may even make inroads into discovering how we may follow similar paths to the destination of creating artificial systems with capacities that were formerly considered to be uniquely human.
LatentSLAM, A Bio-Inspired SLAM AlgorithmSimultaneous localization and mapping (SLAM) has been a long standing challenge in the robotics community (Cadena et al., 2016). For autonomous functioning, a robot must try to map its environment whilst trying to localize itself in the map it is simultaneously constructing (i.e., SLAM). This setup creates a kind of “chicken and egg” problem in that a well-developed map is required for precise localization, but accurate location estimation is also required for knowing how to develop the map by which locality is estimated. This challenge is rendered even more difficult in that not only must the system deal with the seemingly ill-posed problem just described, but the inherent ambiguity of the environment is made even more difficult by sources of uncertainty from sensors and actuators. A fundamental challenge (and opportunity) with localizing and mapping is the detection of loop-closures: i.e., knowing when the robot re-encounters a location it has already visited. The challenge is due to the circular inference problems just described, and the opportunity is due to the particularly valuable occasion for updating afforded by the system having a reliable reference point in space. Such loop-closures have a further functional significance in allowing experiences to be bound together into a unified representational system where updates can be propagated in a mutually-constrained wholistic fashion, so providing a basis for the rapid and flexible construction and refinement of knowledge structures in the form of cognitive schemas that have both graph-like and map-like properties. With further experience, these schemata can then be transferred to the neocortex in the form of more stable adaptive action and thought tendencies, so forming a powerful hybrid architecture for instantiating robust causal world models (Hafner et al., 2020; Safron, 2021b).
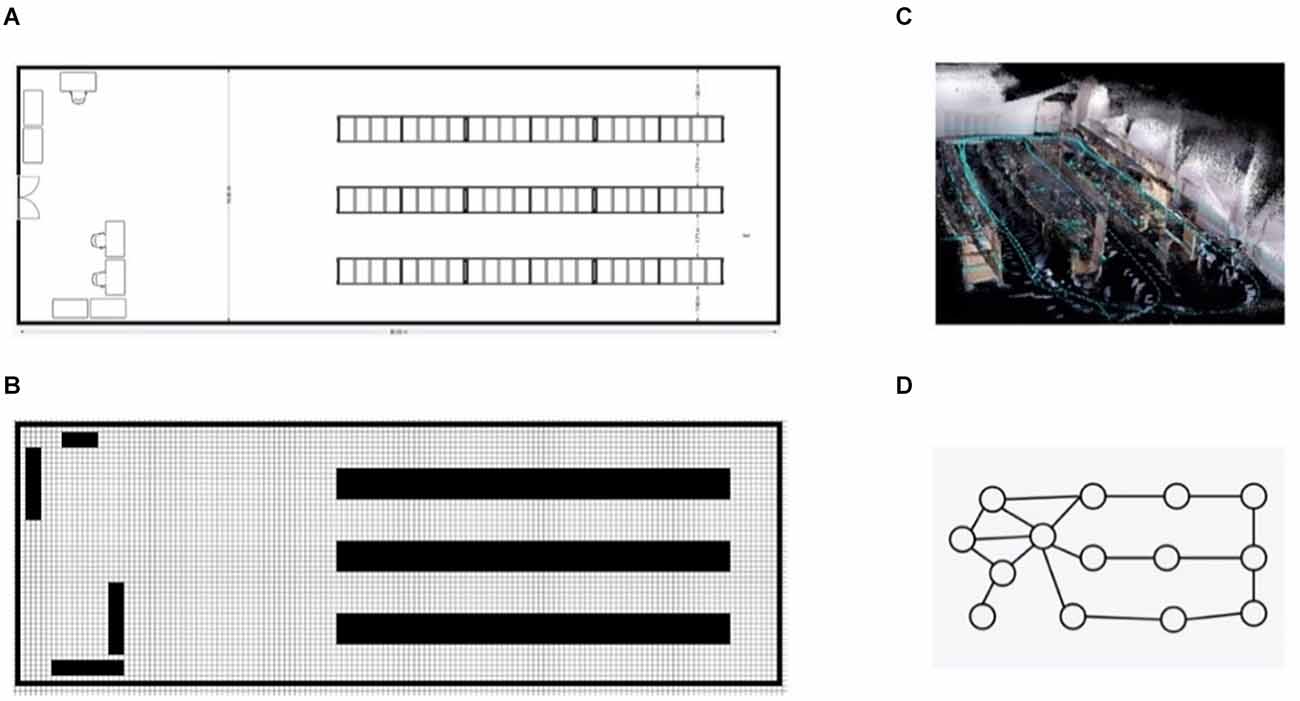
SLAM has traditionally been tackled by Bayesian integration of sensor information within a metric map, typically expressed in terms of absolute distances and angles. In previous work, this amounted to keeping track of distances between the robot and various landmarks in the environment. Distance measurements were typically combined through Bayesian filtering, a principled way of combining heterogenous information sources through Bayesian inference. Modern successful metric SLAM solutions, however, combine lidar scans with the robots internal odometry estimate through Kalman filtering (Kalman and Bucy, 1961) into 2D or 3D occupancy grid maps (Mur-Artal et al., 2015; Hess et al., 2016). These occupancy maps (Figures 1B,C) keep track of locations of objects in the environment by rasterizing space and then marking certain grid locations as inaccessible—due to being occupied with physical obstructions—so creating a map that resembles what an architect would create to diagram a room (Figure 1A).
FIGURE 1
Figure 1. An overview of different map types, show-casing our robotics lab. Panel (A) gives an exact metric view of the room as drawn by an architect. Panel (B) shows the same map as a 2D grid map, to create this map from panel (A) the map was rasterized and untraversable terrain was filled into the granularity of a single raster cell. Pabel (C) shows the same room as an x, y, z mapping of red/green/blue values extracted from a RGBD camera. This 3D grid map was generated by moving the camera through the physical lab. Finally, panel (D) shows the lab as a sparse graph.
Variations on this scheme are popular and differ wildly, either substituting the integration algorithm or the type of metric map. A metric map is akin to a Cartesian grid with regular spacings. However, such spatial maps do not speak to the object identities within the space of interest, nor the particular relations between those objects. Thus, one of the downsides of using metric maps is that by extension all robotic reasoning must also happen on a metric level, any semantic information (i.e., the meaning of a certain cluster of grid-cell activations) needs to be added in later. Further, such metric spaces represent an instance of deviating from natural designs, as hippocampal/entorhinal system (H/E-S) mappings are not independent of the objects contained within these spaces, but instead induce distortions (e.g., expansions and compressions) of spatial relations, which are also modulated as a function of the salience of these entities for the organism/agent (Bellmund et al., 2019; Boccara et al., 2019; Butler et al., 2019).
Popular approaches for such spatiotemporal modeling use particle filters or extended Kalman filters as Bayesian integration methods (Thrun et al., 2005). Kalman filters are notable in that they allow for estimation based on a precision-weighted combination of probabilistic data sources, so allowing for synergistic power in inference and updating, which is also theoretically optimal in making use of all available data (weighted by relative certainty). As will be discussed in greater detail below, such integration may be implemented in the H/E-S via convergent activation in regions supporting high degrees of recurrent processing, such as the CA3 subfield of the hippocampus. However, not only does the H/E-S promote integrative estimation, but also pattern separation/differentiation via other subregions such as CA1, so allowing for attractors to take the form of sparsely-connected graphs—cf. hybrid continuous/discrete architectures based on Forney factor graphs and agent-designs based on independently controllable factors (Friston et al., 2017b; Thomas et al., 2017, 2018). Below we will also describe how such graph-like representations not only help to solve problems in navigating through physical spaces, but may also form a basis for the kinds of high-level cognition sought after in the domain of neurosymbolic AI (Bengio, 2017).
We do not internally represent the world in a metric map. For instance, none of our senses can naturally give us an accurate distance measurement. Neither are we very effective in following a metric description of a path. Hence, it makes more sense for minds like ours (and potentially for artificial agents) to represent a map intuitively as a graph-like structure (Figure 1D), where subsequent graph-nodes could represent subsequent high-level parts of the environment e.g., a node could represent a part of the environment containing a door at a certain rough location. Map traversal then becomes equivalent to the potentially more intuitive problem of graph-traversal or navigating between meaningful landmarks. Trajectories can then be expressed in terms of consecutive semantically meaningful directions. For example, the metrical path “move forwards 2 meters, turn 90 degrees clockwise and continue for 2 meters” could become “after going through the door go right towards the table.” (Note: in vertebrate nervous systems, such forms of navigation could either be based on H/E-S graphs/maps, or occur via canalized striatocortical loops implicitly mapping states to actions, possibly with functional synergy, and also enhanced robustness (and thereby learnability) via degeneracy/redundancy.)
In LatentSLAM (Çatal et al., 2021a), we proposed a bio-inspired SLAM algorithm which tries to mimic this kind of intuitive mapping. With this architecture, we built topological, graph-based maps on top of a predictive model of the world, so allowing for separation of the low-level metric actions of the robot and high-level salient paths. Instead of using raw sensory data—or fixed features thereof (Milford et al., 2004)—directly as node representations, LatentSLAM learns compact state representations conditioned on the robot’s actions, which are then used as nodes. This latent representation gives rise to a probabilistic belief space that allows for Bayesian reasoning over environmental states. Graph nodes are formed from trajectories on manifolds formed by belief distributions. That is, rather than utilizing static maps, our agents navigate through space by moving between landmarks based on expectations of which state transitions are likely to be associated with those kinds of percepts. As an underlying foundation, LatentSLAM adopts the Free Energy Principle and Active Inference (FEP-AI) framework to unify perception (i.e., localization), learning (i.e., map building) and action (i.e., navigation) as a consequence of the agent optimizing one sole objective: minimizing its (expected) free energy (Friston, 2010; Friston et al., 2017a). As will be described in greater detail below, we believe this is an apt description of thinking as the unfolding of a stream of consciousness, with a variety of somatic states being generated in various combinations as the agent perceives and imagines itself moving through space and time.
Representing the world in a graphGraphs form a natural way of representing relations between various sources of information in a sparse and easily traversable manner. In LatentSLAM, such a structure is used to build a high-level map from agent experiences. This experience map contains nodes consisting of a pose, i.e., the agent’s proprioceptive information, and a view distilled from the sensory inputs. Together, the pose and view of an agent specify its unique experience: a different view in the same pose gives rise to a new experience; likewise, the same view from a different pose also constitutes a novel experience. Views generally lie on some learned compact manifold as a compressed version of one or more sensory inputs, integrated and updated through time. Links between experiences in the graph indicate possible transitions between one experience and another.
Figure 2 provides a visual overview of how poses and views combine into an integrated experience map. The pose information allows the agent to embed the graph relative to the geometrical layout of the environment. In this case, the embedding is done in 2D-Cartesian space as the example shows a ground based, velocity-controlled mobile robot. Embedding the graph in a reference frame correlated with environment characteristics organizes observations in ways that greatly enhance inferential power, since this avoids combinatorial explosions with respect to under-constrained hypothesis spaces. That is, a given sensory impression could correspond to an unbounded number of world states (e.g., something may be big and far away, or small and nearby), but coherent perspectival reference frames allow for likely causes to be inferred by mutually-constraining relevant contextual factors.
FIGURE 2
Figure 2. The formation of an experience-map out of views and proprioceptive poses. Sensory observations first need to be integrated into views to be compared to existing experiences from the graph. The shown graph is embedded in a Cartesian reference frame extracted from the proprioceptive information.
Experience mapThe experience map (or graph) provides a high-level overview of the environment. Each node in the map represents a location in the physical world where the robot encountered some interesting or novel experience. These positions are encoded in poses in a spatial reference frame, e.g., a 2D-Cartesian space, whilst the experiences themselves are expressed as implicit representations of corresponding sensory observations. When view representations change according to distances to known landmarks, this setup resembles the approach described in the classical graphSLAM algorithm (Thrun and Montemerlo, 2006). Note that the seminal work on graph-based experience maps (Milford et al., 2004) also used an embedding of sensory observations into a lower dimensional space. However, in contrast to our approach, these mappings were deterministic and fixed for all observations.
The graph is embedded in, as opposed to being expressed in, a spatiotemporal reference frame, meaning that over time stored (or inferred) poses on the map are likely to exhibit deviations from their initial recorded values as they are progressively updated. Loop-closure events trigger a graph-relaxation phase wherein current graph nodes are re-positioned to take into account the unique opportunity accompanying the closing of the loop (i.e., the creation of a closed system of node linkages allowing for updating of the entire graph through energy minimization, accompanied by more confident location-estimation through experience-trajectory converging on known landmarks). This relaxation not only affords opportunities for map refinement, but it is also necessary due to the accumulation in pose errors from odometry drift. Wheel slippage, actuator encoder errors, and other similar effects amount to a continual increase in the uncertainty of the pose estimate. These sources of error/noise are part of what makes loop-closure such a hard problem in general. However, the loose embedding of pose information in the graph (combined with associated views) allows the map building to become robust to sensor and actuator drift, thereby maintaining a consistent map of the environment.
ViewsLatentSLAM probabilistically learns views from sensory observations by incorporating the action trajectories from which they are generated, which differentiates our architecture from similar algorithms (Milford et al., 2004). The agent keeps track of a sample of the current belief distribution over states, which gets updated at each time-step into a new belief through variational inference. This sample constitutes either the current agent view, or a sensory-decoupled (or imagined) estimate of the environment from the latent space of the agent’s generative model. At each time-step, the agent inputs a conjunction of the current action, sample, and current observation into its generative model. This world model then generates a new state belief distribution based on the current state sample, which functions as a source of predictions for a predictive coding perceptual architecture. At training time, the generative model is tasked with predicting future observations based on previous recordings of trajectories through the environment.
ProprioceptionAn agent needs a principled way of keeping track of its estimated pose in the local environment. That is, an agent needs a coherent way to integrate changes in its local pose according to some local reference frame. In this form of proprioception, agents can estimate the effects of certain actions on local pose information relative to adjacent portions of its environment. This aspect of embodiment is essential in enabling consistent mapping and localization through challenging terrains.
In LatentSLAM this is handled through the low-level generative model on the one hand, and the pose continuous attractor network (CAN) on the other hand. The generative model allows for reasoning in terms of how actions affect views: i.e., it reduces the pose to an implicit part of the latent state representation. The CAN, however, leaves pose estimation as an explicit part of the greater LatentSLAM model. It integrates successive pose estimates through time in a multidimensional grid representing the agent in terms of internally measurable quantities. In the case of a ground-based mobile robot these quantities would be the expected difference in x,y pose and relative rotation of the robot over the z-axis. Hence, for a ground-based robot the CAN would be expressed as a 3D grid, that wraps around its edges. Sufficiently large displacements along the x-axis of this grid would teleport the pose estimate back to the negative bound of the same axis. This to accommodate for traversing spaces that are larger than the number of grid cells in the CAN. The pose estimate in the CAN is represented as an activation per grid cell, the value of which determines the amount of belief the model gives to the robot being in this exact relative pose. Multiple grid cell locations can be active at any given time, indicating varying beliefs over multiple hypotheses. The highest activated cell indicates the current most likely pose. Cell activity is generated in two ways: activity is added (or subtracted) to a cell through motion and the current proprioceptive translation thereof in terms of grid-cell entries; alternatively, activity may be modified through view-cell linkage. When a view is sufficiently different from others it gets added to the experience map together with the current most likely pose. This mechanism in turn allows experiences, when encountered, to add activation into the CAN at the stored pose estimate. This process can shift, and often correct, the internal pose estimate of the agent, allowing it to compensate for proprioceptive drift.
This conjunction of views and poses has notable parallels with neural representations decoded from respective lateral and medial entorhinal cortices (Wang C. et al., 2018), which constitute the predominant source of information for the hippocampal system (i.e., the experience map). It is also striking that the self-wrapping representational format for LatentSLAM poses/views recapitulates the repeated metric-spacing observed for entorhinal grid cells, whose location invariance may potentially provide a basis for knowledge-generalization and transitive inference across learning epochs and domains (Whittington et al., 2022). We believe that such correspondences between naturally and artificially “designed” systems constitutes strong evidence in support of a SLAM perspective for understanding the H/E-S.
A hierarchical generative modelThe entirety of the LatentSLAM framework can be understood mathematically in terms of a hierarchical generative model (Figure 3; Çatal et al., 2021b).
FIGURE 3
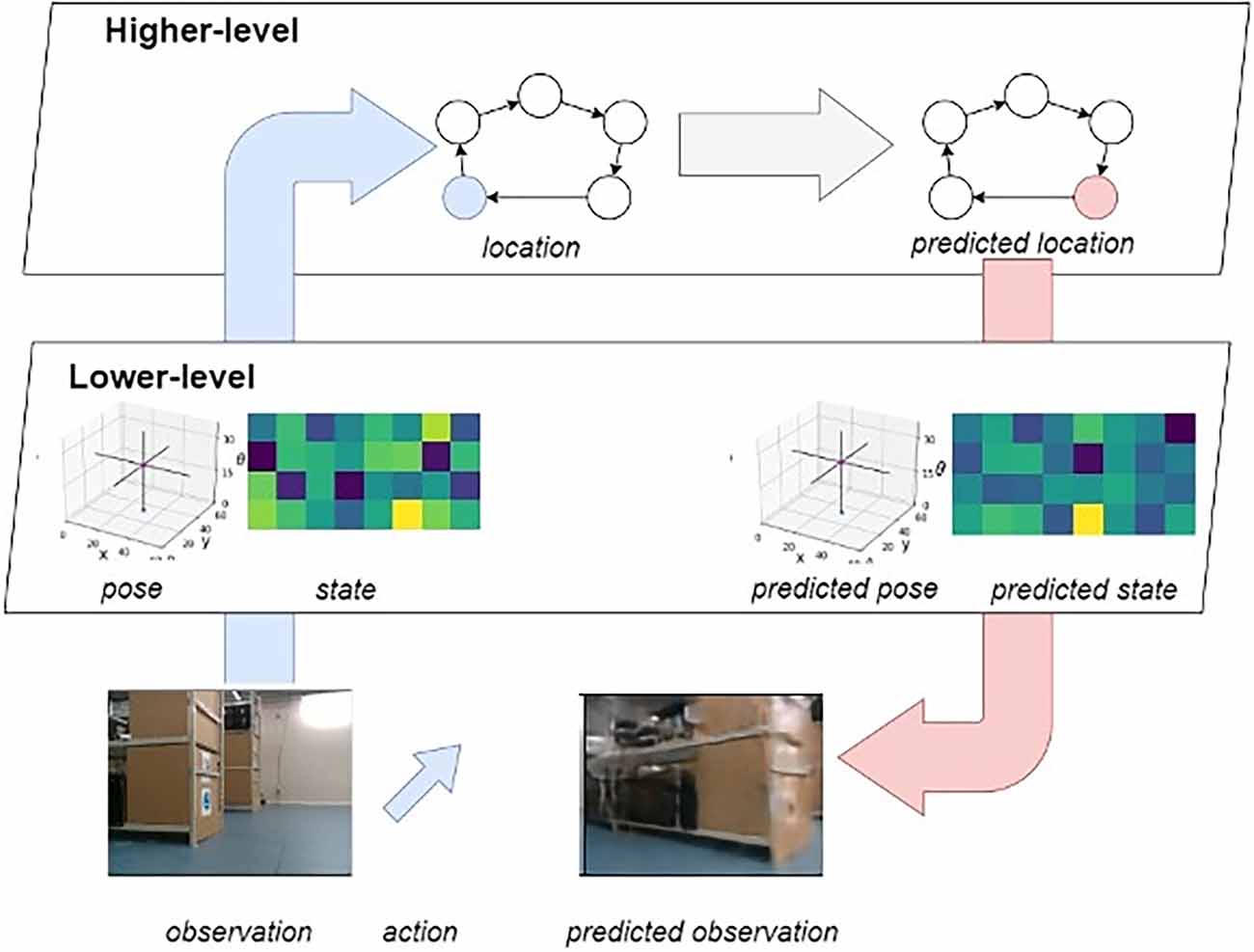
Figure 3. Overview of the hierarchical generative model. Highlighted in blue is the bottom-up sensory stream, and in pink the top-down prediction stream. As the agent moves about, it alternates between these two modes. On the one hand it will infer state information from the observations, and on the other hand it will predict future observations from inferred states.
There are two distinct levels of reasoning, each using their own generative model to explain the dynamics of the environment at the corresponding level of abstraction. As the generative models are stacked, the higher-level model takes the states from the lower level as observations, while the lower level observes the actual environment through the agents’ sensors. Each separate generative model can be seen mathematically as representing the joint probability p(o˜,s˜,a˜)=p(a0)p(s0)p(o0|s0)∏t=1Tp(st|st−1,at−1)p(ot|st), with o relevant observations at each level; s state description, views or locations; and a possible actions at each level (either displacements in the environment or node transitions). These models only consider the generative process up until some future time horizon T. The exact instantiation of the joint probability and corresponding posterior distributions differ between each level of the hierarchy; interested readers are referred to Çatal et al. (2021b) for a more thorough description of this kind of model, and some extra details are provided in the “Appendix”.
Action and state inference, that is finding suitable instantiations of the posteriors p(at|st) and p(st|st−1,ot,at−1) is achieved through Active Inference as understood in the context of the Free Energy Principle (FEP-AI; Friston et al., 2017a). In FEP-AI, intelligent agents are governed by predictive models that attempt to minimize variational free energy through updating of internal beliefs and modification of external states through enaction (hence, active inference). When implementing similar mechanisms in artificial agents such as robots, inference is amortized—cf. planning as inference via memorization of successful policies (Gershman and Goodman, 2014; Dasgupta et al., 2018)—through training variational auto-encoders (VAEs) with objective functionals that minimize (variational) free energy. The model consists of three neural networks, with each representing a conditioned probability distribution that outputs different multivariate Gaussian distributions based on differing inputs. These inputs can take the form of different sensor modalities such as lidar or camera; or they might be actions depending on the flow of information between neural networks.
State inference emerges naturally from the neural network architecture and training method. Active inference, however, leverages the trained network to create a set of imaginary trajectories from which optimal action sequences can be selected through expected free energy minimization. The model is trained on a free-energy objective functional, wherein it is tasked with minimizing Bayesian surprise—in the form of KL divergence—between prior and posterior estimates on the state. In this hierarchical generative model, there are two sources of information flowing in two directions at any given time. Sensory observations flow upwards from the real world through the lower-level pose-view model towards the higher-level mapping model. Predictions flow in the opposite direction, originating in the higher-level mapping model and flowing down into the environment through the predicted actions in the lower-level pose-view model.
Bottom-up sensory streamsThe agent observes the world through sensors as it moves around the environment. At the lower-level of the generative model, the agent actively tries to predict future incoming sensory observations (Figure 3, blue arrow indicating informational flow). The agent actively abstracts away distractor elements in the observations as every observation gets encoded into a latent vector (i.e., views). As this encoding is generated from actions, observations and the previous latent state, the model considers the effects that history and actuation (or enaction) have on the environment. The abstracted view then gets fed into the higher-level mapping model which actively predicts the next experience from the previous one, taking into account the way the agent is presently traversing the experience graph and its current view.
Top-down prediction streamsAt the same time, decisions flow down from the higher-level to the lower-level of the generative model (Figure 3, red arrow indicating informational flow). As a new navigational goal is set, the desired trajectory through the experience map is generated. Each node transition denotes one or more displacements in the real environment. While traversing the graph, the agent sets the views associated with the visited nodes as planning targets for the lower-level model. At the hierarchically higher level, the agent samples multiple state estimates from the current belief distribution over states and leverages the predictive capabilities of the generative model to envision possible outcomes up until some fixed planning horizon (Friston et al., 2021). From all these imagined future outcomes, the optimal one is selected after which the process repeats itself until the target view and pose are met. In turn the next node in the map trajectory is used to generate a new lower-level planning target.
Creating the mapAs mentioned earlier, once an agent encounters a sufficiently different experience, a new node is inserted in the experience map with the current view and pose. This process results in an ever-growing map of the environment as the agent explores the world. Hence, there needs to be a principled way to determine whether a view is new or is already known to the agent. As with many such problems, the solution presents itself in the form of a distance function in some well-defined mathematical space. A well-chosen distance function will allow the agent to not only build a consistent map of its environment but also account for loop-closure events.
Distance functionsMany SLAM algorithms use the Euclidian distance between poses to determine whether the current observation and pose are known in the map or represent some novel experience. However, due to the inherent drift in proprioception in many real-world scenarios, often this distance metric between poses and/or observations is not enough. Alternatives present themselves depending on the form of the probabilistic framework upon which the algorithm is based.
As described in Section “A hierarchical generative model”, LatentSLAM learns a latent state space manifold over sensory inputs (i.e., camera images). This enables the agent to not only evaluate Euclidian distances between poses, but also distances between two sensory inputs in the latent statistical manifold. To evaluate distances inside the manifold we need an appropriate distance measure. One notable candidate is the Fisher information metric (Costa et al., 2015), which represents informational differences between measurements. In our context, this means that two measurements are only encoded in different nodes of the experience map when there is sufficiently more information in one compared to the other. For example, moving in a long, white hallway with little texture will not yield a change in information in the latent manifold, hence this will be mapped on a single experience node. Only when a salient feature appears, for example a door, there will be enough sensory information to encode a new experience. In such a scenario however, methods building a metric map will likely fail as it is impossible to accurately track one’s position in a long, textureless hallway.
Note how the Fisher information metric is also related to the free energy minimization objective used for manifold learning. Concretely, if we take KL[x||x+δx] with x a probability distribution and x+δx a distribution close to x we get that if δx→0 then KL[x||x+δx]→12F(x)(δx)2. In other words, for infinitesimally small differences between distributions the KL divergence approaches the Fisher information metric (Kullback, 1959). This can be interpreted as integrating the agent’s Bayesian surprise over infinitesimal timesteps to measure the “information distance” traveled.
However, since the Fisher information metric and KL divergence do not have closed form solutions for many types of probability distributions, we use cosine similarity between the modes of the distribution as a numerical stable approximation function. Therefore, LatentSLAM evaluates information differences between experiences instead of differences in exact environmental observations.
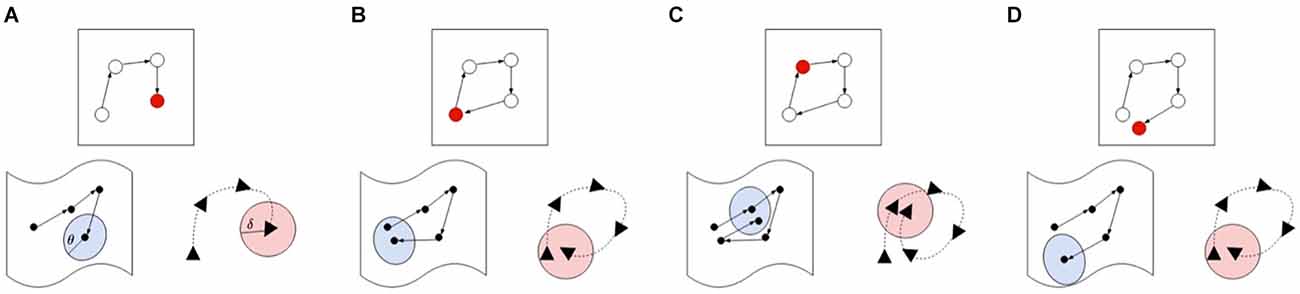
Node creation and loop-closuresWhen a salient landmark is identified, but the agent cannot find a single node in the graph which matches closely enough with the current view or pose, a new node must be inserted in the graph. Alternatively, if the current experience matches both on pose and view, a loop-closure is registered, but the agent leaves the map as is. In order to determine whether two experiences match, LatentSLAM uses a matching threshold θ. Both the pose and view of an experience is matched to experiences stored in the map. Figure 4 gives a visual overview of the various possible matching cases. If neither view nor pose match with any possible stored view or pose, a new experience is created and inserted into the map, as is shown in panel A. When the view and the pose both match, a loop-closure has occurred and the current experiences shifts to the stored experience, at which point a graph-relaxation phase is initiated. If the current observed experience matches with a stored experience further along the path, a relocation is required, and the estimate is shifted further along the path in the graph. Finally, if the current pose estimate matches a stored experiences pose, but does not find the corresponding matching view, a new node is inserted at the same location. This allows the agent to keep track of varying views of the same landmark throughout the map.
FIGURE 4
Figure 4. Different cases for illustrating the map updating procedure. For each case we show the map (top), pose (bottom right), and views (bottom left) in their own respective spaces. The current active map node is always indicated in red and the current pose or view value is the final one in the sequence. In case (A), the agent encounters a new experience which is not within the threshold boundary of both the poses and views, so a new node is inserted into the map. Case (B) demonstrates a loop-closure event, where both the pose and view are within their respective thresholds, blue indicating the area pose information demarcated by its threshold θ, pink indicating the area covered by the view threshold. If both view and pose are within the threshold boundary (blue and pink) of the next node (case C), the estimate is shifted to the next node, skipping the current node in the graph. Finally, case (D) shows a matching pose without a matching view, requiring a new node insertion in the map.
Graph-relaxationAs nodes are inserted throughout the graph, each new pose observation is subjected to sensor drift, leading to increasing errors for remembered poses. To address this issue, whenever a loop-closure event is encountered, graph-relaxation is applied to the experience graph. The algorithm treats every node in the graph as being connected with its neighbors as if suspended by weighted springs. The strength of each spring is related to the pose distances between the nodes. Then the algorithm reduces the total “energy content” of the graph by shifting the poses in such a way that the sum of the forces is minimized. This approach is similar to graph-relaxation in similar SLAM algorithms (Thrun et al., 2005; Thrun and Montemerlo, 2006). Graph-relaxation has the effect of morphing the shape of the pose embedding of the map to reflect the actual topology of the environment.
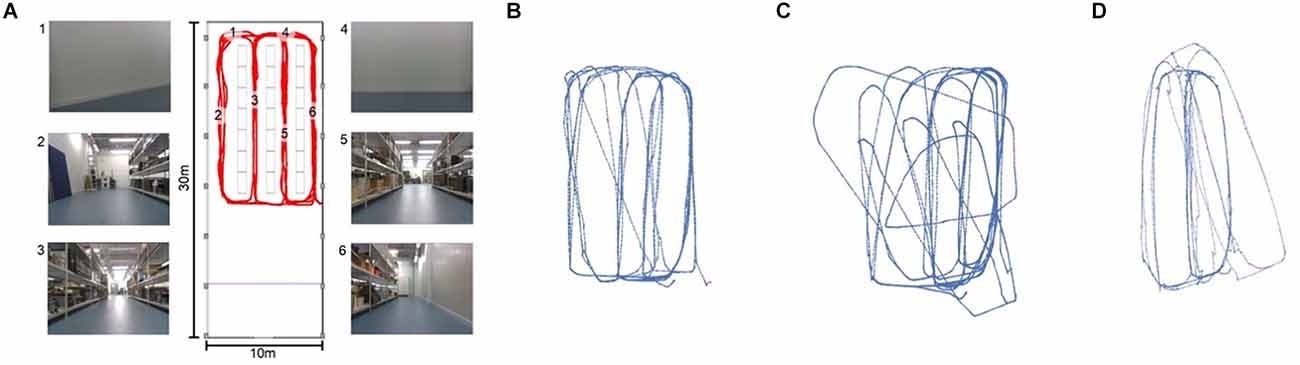
Setting the thresholdBecause the matching threshold has a significant impact on the shape and content of the map, it is one of the more important hyper parameters of LatentSLAM. For every environment there is an optimally tuned threshold parameter θ⋆. A matching threshold much lower than this optimal value will result in a mapping procedure with almost no loop-closure events. The map will contain every tiny permutation in views and poses as a separate node and will be insufficient in countering odometry drift. Conversely, if the threshold is set much higher than θ⋆, the mapping procedure will lump everything together in a small cluster of nodes. Figure 5 provides a visual example of the effects of the matching threshold on the resulting map.
FIGURE 5
Figure 5. Figure 5. (A) Metric map of our lab environment, with some example camera views at the marked locations. The views at different locations (i.e., 3 and 5 or 1 and 4) appear very similar, making this a hard environment for visual SLAM. Panels (B–D) show three possible mappings of the trajectory shown in red in panel (A). (B) With a well-tuned threshold θ⋆, our LatentSLAM algorithm recovers a topological map of the environment, clearly separating the four different aisles. (C) If the threshold is too stringent (θ ≪ θ⋆), loop-closure events are not detected, as every view is seen as unique, and the map becomes incorrect as proprioception errors (the main source of mapping errors) add up. (D) When the threshold is too relaxed (θ ≫ θ⋆), similar looking aisles are mapped onto each other due to false positive loop-closures.
NavigationNavigation is achieved through a dual process of first selecting nodes in the higher-level experience map, and then setting the node-views as targets for the active inference based lower-level action planner. In the first phase a path is generated through the graph connecting the current node and the target node. The final node is selected based on the visual reconstruction of the stored view. That is, the user of the system selects the view they want the system to have at a certain place. Once an experience trajectory is found, the agent can start acting in the environment. As each consecutive experience node is separated from its neighbors by a finite set of actions, a sequence of target views are extracted from the trajectory, forming the imaginary trajectory the agent may (approximately) bring about through overt enaction. The (active inference based) lower-level generative model is then capable of filling in further gaps between imagination and reality through additional planning.
At each step, the agent takes into account its current view and imagined trajectory up until the next target view. This imagination process leverages the learned intricacies and dynamics of the environment to compensate for the potential stochasticity in the interaction. Once a suitable trajectory is imagined at the higher-level, the agent enacts the first step of the trajectory, after which the lower-level planning process is repeated. These step-by-step transitions through the environment make the agent more robust against unexpected changes in the environment, which it might not have captured during model training.
Crucially, imagined trajectories are scored using a common objective functional of expected free energy, both on the higher level of proposed paths through the experience map/graph, as well as on the lower level of inferring actions capable of transitioning the agent between nodes (Çatal et al., 2021b). That is, trajectories are more likely to be selected if they bring the agent towards preferred outcomes and/or resolve uncertainty about the environment. Hence, action selection comprises a trade-off between instrumental value and epistemic value, which are naturally balanced according to a singular criterion of variational free energy. To provide an example in navigation, this tradeoff between the extrinsic value of realizing prior preferences and the intrinsic value of novel information could respectively manifest as either selecting a safer route via well-recognized landmarks or instead taking an unknown (but potentially shorter) path through a dark forest. Further, the discovery of such shortcut paths through space speaks to the kinds of flexible inference and learning that first motivated construals of the hippocampal system in terms of cognitive maps (Tolman, 1948), and in a G-SLAM context could be thought of as a way of understanding a core aspect of intelligence in the form of creative insight. And in the context of AI, such creative cognition may afford the creation of much sought after capacities for powerful inferences and one-shot learning in novel situations, which if realized could greatly enhance autonomous functioning.
Limitations and future directionsThere are several limitations with the current implementation of LatentSLAM. First, the experience graph is incapable of merging nodes with similar views and approximately similar poses into a single unified stochastic node. This in turn leads the algorithm to generate an increasing number of nodes for each pass through a single location. Second, the lower-level planning is limited to the sequence length encountered during training, and as such the model is incapable of imagining coherent outcomes beyond this time horizon. This brings us to a potentially substantial limitation of LatentSLAM, in that the lower-level generative model needs to be pre-trained on the types of observations it can encounter in the environment. That is, when the target views are unknown, imaginative planning may be required wherein agents visualize an assortment of potentially rewarding (counterfactual) action-outcome pairings. Going forward, we aim to alleviate these constraints by adapting the training procedure to accommodate online learning, allowing the agent to learn to imagine whilst exploring (Safron and Sheikhbahaee, 2021), which may be understood as a kind of deep tree search through policy space via Markov chain Monte Carlo sampling (Dohmatob et al., 2020; Friston et al., 2021), with potentially relevant insights obtainable from advances in Bayesian meta-reinforcement learning (Schmidhuber, 2020).
To extend the biological fidelity (and potential functional capacities) of our architecture, we intend on attempting to recapitulate particular empirical phenomena such as the specific conditions under which new place fields are introduced or pruned away in mammalian nervous systems. For example, the insertion of environmental barriers or encountering corridors leading to identical rooms may induce duplication of sensory views at different locations, which may speak to the phenomenon of place-field duplication—which in a LatentSLAM context would involve node creation (Lever et al., 2009; Spiers et al., 2015)—yet where these representations may also disappear with further learning. This kind of pruning of nodes—potentially involving “artificial sleep”—could be a valuable addition to latent SLAM’s functionality, and may potentially be understood as an instance of Bayesian model reduction with respect to structure learning (Friston et al., 2019), so providing another means by which capacities for creative insight (in terms of discovering more elegant models) may be realized in AI.
With respect to these particular phenomena involving challenging ambiguous situations, we may speculate that highly-similar-but-subtly-different pose/experience map combinations could represent instances associated with high levels of prediction-error generation due to a combination of highly precise priors and contradictory information. Speculatively, this could be understood as an example of “hard negative mining” from a contrastive learning perspective (Mazzaglia et al., 2022). As will be described in greater detail below, such highly surprising events may be similar to experiences of doorway or threshold crossing, and may trigger the establishment of event-boundaries via frame-resetting and spatial-retiling. Speculatively, the assignment of particular content to particular rooms in “memory palaces” could be understood as a necessary part of the art of remembering due to this phenomenon potentially interfering with semantic “chunking” (or coherent co-grounding). In attempting to apply LatentSLAM to cognition more generally, it could potentially be fruitful to look for generalizations of these phenomena with respect to seemingly non-spatial domains, such as with respect to creativity and insight learning problems in human and non-human animals.
Finally, and with further relevance to realizing capacities for imaginative planning and creative cognition, we will attempt to include phenomena such as sharp-wave ripples and forward/reverse replay across hippocampal place fields (Ambrose et al., 2016; de la Prida, 2020; Higgins et al., 2020; Igata et al., 2020), which have been suggested to form a means of efficient structural inference over cognitive graphs (Evans and Burgess, 2020). With respect to our goal-seeking agents, forward replay may potentially help to infer (and prioritize) imagined (goal-oriented) trajectories, and reverse replay may potentially help with: (a) back-chaining from goals; (b) increasing the robustness of entailed policies via regularization, and (speculatively), and (c) allowing for a punishment mechanism via inverted orderings with respect to spike-timing-dependent-plasticity. In these ways, not only may a G-SLAM approach allow for deeper understanding of aspects of biological functioning, but attempting to reverse engineer such properties in artificial systems may provide potentially major advances in the development of abiotic autonomous machines.
The Hippocampal/Entorhinal System (H/E-S)The hippocampal/entorhinal system (H/E-S) represents a major transition in evolution (Gray and McNaughton, 2003; Striedter, 2004), with homologs between avian and mammalian species suggesting its functionality becoming established at least 300 million years ago (Suryanarayana et al., 2020), with some of its origins potentially traceable to over 500 million years in the past with the Cambrian explosion (Feinberg and Mallatt, 2013), and potentially even earlier. It may be no overstatement to suggest that the H/E-S represents the core of autonomy and cognition in the vertebrate nervous system, with similar organizational principles enabling the potentially surprising degrees of intelligence exhibited by insects (Ai et al., 2019; Honkanen et al., 2019).
While their precise functional roles continue to be debated, the discovery of hippocampal place cells and entorhinal grid cells was a major advance in our understanding of how space is represented in the brain (O’Keefe and Nadel, 1978; Hafting et al., 2005). Similarly important was the discovery of head direction cells in rats, which were found to activate according to moment-to-moment changes in head direction (Sharp PE, 2001). Place cells have been modeled as representing a “predictive map” based on “successor representations” of likely state transitions for the organism (Stachenfeld et al., 2017), and grid cells have been understood as linking these graphs (or Markov chains) to particular events happening within a flexible (multi-level) metric tiling of space, so allowing for estimates of locations via path integration over trajectories. While we need not resolve the precise correspondences between these cell types here, there are intriguing developmental observations of place cells acquiring more mature functioning prior to grid cells, both of which likely depend on head-direction cells for their emergence (Canto et al., 2019; Mulders et al., 2021). In other contexts, place-specific cells have been found to index temporal sequence information, potentially functioning as “time cells” (Pastalkova et al., 2008), so providing a further means by which the H/E-S may provide foundations for coherent sense-making and adaptive behavior through the spatiotemporal organization of organismic information (Eichenbaum, 2014; Umbach et al., 2020).
In addition to place, time and grid cells, a variety of additional specialized cell types have been observed in the H/E-S. While it was previously assumed that these features represent innate inductive biases (Zador, 2019), increasing evidence suggests these specialized cell types may arise from experience-dependent plasticity, including models with similar architectural principles to the ones described here. In recent work from DeepMind (Uria et al., 2020), a recurrent system was used to predict sequences of visual inputs from (the latent space) of variational autoencoders. A natural mapping from egocentric information to an allocentric spatial reference frame was observed, including the induction of specialized units with response properties similar to head direction, place, band, landmark, boundary vector, and egocentric boundary cells. Similar results have been obtained with the Tolman-Eichenbaum machine (Whittington et al., 2020), including demonstrations of reliable cell remapping, so enabling transfer learning across episodes with the potential for the creative (re-)combination of ideas and inferential synergy. Other intriguing work on the emergence of specialized H/E-S functions through experience comes from work on “clone-structured cognitive graphs”, where various aspects of spatial maps are parsimoniously formed as efficient (and explanatory) representations of likely state transitions through the duplication and pruning of nodes in a dynamically-evolving sequence memory (George et al., 2021). While this evidence suggests a potentially substantial amount of experience-dependence in the emergence of the “zoo” of specialized neurons for spatiotemporal navigation, the development of these features still involve clear innate inductive biases (Zador, 2019). Specifically, specialized pathways ensure that the H/E-S receives neck-stretch-receptor information from the mamillary bodies and yaw/pitch/roll information from the vestibular apparatus (Papez, 1937; Wijesinghe et al., 2015), so providing bases
留言 (0)