
記住我


 Volume 141, August–September 2022, 104426
Volume 141, August–September 2022, 104426 Highlights•
Highlights•We study the kinematics and mechanics of mandibles of trap-jaw ants.
•We analyze the trade-off between powerful clamping and efficient impact resistance.
•The hollowness ratio plays an essential role in counterbalancing the trade-off.
•The mandibles meet the demands of powerful clamping and efficient impact resistance.
•The hollow mandible achieves a more robust balance than the solid mandible.
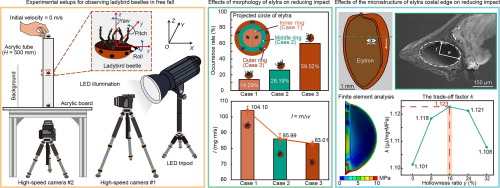
AbstractThe trap-jaw ant Odontomachus monticola manipulates its hollow mandibles to generate extremely high speed to impact various objects through a catapult mechanism, making the violent collision occur between the mandible and the impacted objects, which increases the risk of structural failure. However, how the ant balances the trade-off between the powerful clamping and impact resistance by using this hollow structure remains elusive. In this combined experimental and theoretical investigation, we revealed that the hollowness ratio of the mandible plays an essential role in counterbalancing the trade-off. Micro-CT and high-speed images suggested that the hollow mandibles facilitate a high angular acceleration to 108 rad/s2 for an enormous clamping force. However, this hollowness might challenge the structural strength while collision occurs. We found that under the same actuating energy, the von Mises stress of the object collided by the natural mandible striking can reach up to 2.9 times that generated by the entirely solid mandible. We defined the efficiency ratio of the von Mises stress on the impacted object to that on the mandible and found the hollow mandible achieves a more robust balance between powerful clamping and impact resistance compared to the solid mandible.
KeywordsTrap-jaw ant
Hollow mandible
Collision dynamics
Structural adaptation
Trade-off
Finite element analysis
View full text© 2022 Elsevier Ltd. All rights reserved.
留言 (0)