
記住我





Robot-assisted thoracoscopic esophagectomy was performed on 53 patients between June 2010 and December 2016. Surgical stability was achieved from the eleventh patient. The initial 10 surgeries were excluded from the analysis owing to non-standardized port positions and surgical procedures. The 43 patients who underwent the procedure following the standardization of the method were assigned to the RAMIE group. The indications of robotic and conventional esophageal cancer surgery (systemic conditions, such as cardiopulmonary function) were as follows: (1) thoracic esophageal cancer (any histological type), (2) age ≤ 80 years, (3) invasive tumor depth ≤ clinical T3 factor (mucosal layer to adventitia) upon preoperative diagnosis (excluding patients who underwent salvage surgery after radical chemoradiotherapy), (4) no medical history of extensive thoracic surgery, and (5) provided written consent to undergo robot-assisted surgery.
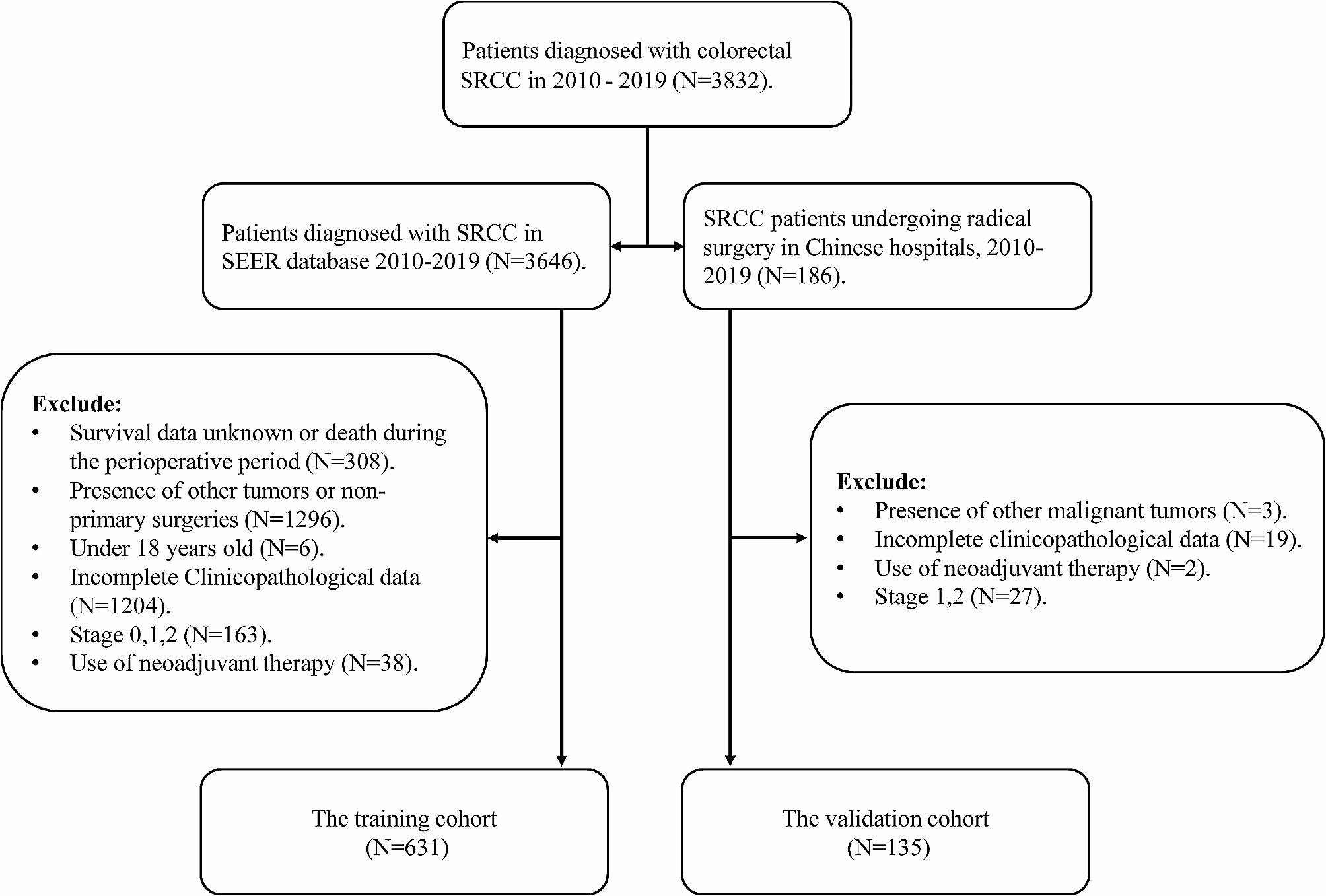
In addition, 43 patients who underwent MIE during the same period and met the conditions described above for RAMIE were included in the MIE group (Fig. 1).
Fig. 1
Patient tree of the 86 patients: 43 patients were assigned to each of the MIE and RAMIE groups. MIE: minimally invasive esophagectomy, RAMIE: robot-assisted minimally invasive esophagectomy
The patients selected RAMIE or MIE based on their preferences. At the time of selection, the patients were informed that RAMIE would be performed as part of a clinical study that was approved by the ethics committee of the institution and that MIE was a medical treatment covered by regular health insurance. Surgeries were performed by two surgeons certified by the Japan Robotic Surgery Society. Surgical outcomes, postoperative complications, and long-term treatment outcomes were retrospectively compared between the two groups. This study was approved by the Ethics Committee of Tokyo Medical University (Approval no. 20). Written informed consent was obtained from all the patients who underwent robotic esophagectomy.
Study endpointsThe short- and long-term postoperative outcomes were compared between the two groups. The primary endpoint was the 5-year overall survival (OS). The secondary endpoints were 5-year disease-free survival (DFS) and recurrence rates.
Preoperative therapyCases receiving preoperative therapy were selected based on JCOG9907 [20]. Neoadjuvant chemoradiotherapy was selected for cases with clinical T3 or higher.
Surgical procedure (techniques)Patients underwent RAMIE using the surgical technique previously reported by Osaka et al. and the da Vinci Si Surgical System (Intuitive Surgical, Inc., Sunnyvale, CA) [21]. RAMIE and MIE were performed using a similar surgical procedure. Thoracic surgery was performed under 8-mmHg of artificial pneumothorax in the prone position. The positions of the five ports in RAMIE were as follows: an 8-mm port for the da Vinci right arm slightly ventral to the third intercostal posterior axillary line, a 12-mm port for the da Vinci camera at the sixth intercostal posterior axillary line, an 8-mm port for the da Vinci left arm slightly ventral to the ninth intercostal shoulder blade line, and 12- and 5-mm ports for assistance at the midaxillary line of the fourth and eighth intercostals. The positions of the six ports in the MIE were as follows: a 12-mm port slightly ventral to the sixth intercostal midaxillary line, 12-mm port for the camera at the eighth intercostal shoulder blade line, 12-mm port at the eighth inferior angle of the scapula, and 5-mm ports at the eighth intercostal midaxillary line, sixth medial intercostal scapula, fourth intercostal posterior axillary line, and second intercostal midaxillary line, respectively.
In the upper mediastinum, the lymph nodes around the bilateral recurrent laryngeal nerves (RLN) and esophagus were dissected. In the middle and lower mediastinum, ligation and transection of the arch of the azygos vein and right bronchial artery and dissection of the esophagus and middle and lower mediastinum were performed. The thoracic duct was preserved. For abdominal surgeries, da Vinci was not used in either group. Gastric engorgement and abdominal lymph node dissection were performed using hand-assisted laparoscopic surgery (HALS). Thereafter, the stomach was removed from the body through a small median incision of the HALS. A narrow gastric tube with a width of approximately 3 cm was created and elevated into the cervical region via retrosternal or posterior mediastinal routes. During cervical surgery, the bilateral cervical lymph nodes were dissected, and cervical esophagogastric anastomosis was performed using a circular stapling device. Two- (except #104RL) or three-field lymph node dissection (FLND) was performed based on the degree of disease progression and surgical risks. Three FLND was performed in a patient with upper thoracic esophageal cancer and suspected cervical lymph node metastasis.
Data collectionWe recorded the operation time at each step of the procedure in detail. Thoracic operative time was defined as time from the start of the chest incision to the completion of closure of the thoracic wounds. Intraoperative events such as bleeding, arrhythmia, and iatrogenic injury were recorded. For pathological results, the resected specimens in this study included proximal, distal, and circumferential margins. R0 resection was defined as > 1 mm from all resection margins. R1 resection was defined as microscopical residual tumor, and R2 resection was defined as macroscopical residual tumor. All retrieved lymph nodes were recorded separately for pathological examination. Posttreatment follow-up was performed in our hospital once every 3 months within the first to five years. Postoperative mortality was defined as death from any cause. Postoperative complications including pulmonary complications, cardiac complications, wound infection, bleeding, anastomotic leakage, chylothorax, and RLN paralysis were graded according to the Clavien-Dindo classification [22]. Furthermore, anastomotic leakage, chylothorax, and RLN paralysis were graded according to definitions stated by the Esophagectomy Complications Consensus Group (ECCG) [23].
Propensity score matchingPropensity score matching (PSM) between patients who underwent RAMIE and MIE was conducted to minimize the selection bias arising from a retrospective study. Co-variables used for PSM included confounders or risk factors based on the literature and clinical practice: age, sex, body mass index, alcohol consumption, smoking (Brinkman Index), American Society of Anesthesiologists stage, comorbidities (myocardial infarction, heart failure, cerebrovascular disease, chronic pulmonary disease, liver disease, diabetes without chronic complications, renal disease), tumor location, histology, clinical TNM stage (Union for International Cancer Control, 7th edition), and preoperative therapy. Propensity scores for each patient were obtained using a multivariate logistic regression model based on patient characteristics. Nearest-neighbor matching was performed using a caliper width of 0.2 standard deviations of the estimated propensity score logit for one-to-one pair matching without replacement. The remaining propensity-matched groups were assessed using the standardized mean difference (SMD), with absolute values < 0.1 considered well-balanced between the two groups.
Statistical analysisStatistical analyses were performed using SPSS version 28.0 software (IBM Corp., Armonk, NY, USA). Survival analysis was performed using the Kaplan–Meier method. Patients in the two matched cohorts were reviewed for OS and DFS. Continuous variables were presented as SMD and median (interquartile range). Categorical variables were presented as numbers (%).
Outcomes in the matched cohorts were compared using the McNemar test or McNemar’s exact test for categorical variables and the Wilcoxon signed-rank test for continuous variables. In the pre-matched cohorts, these outcomes were compared using Pearson’s χ2 test or Fisher’s exact test for categorical variables and the Wilcoxon rank-sum test for continuous variables. All P values were two-sided, and P < 0.050 was considered statistically significant.
留言 (0)