
記住我



Available online 17 January 2024, 100820
 Author links open overlay panel, Highlights•
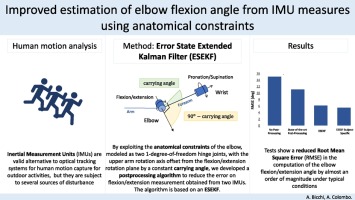
Author links open overlay panel, Highlights•Anatomical constraints leveraged for precise joint angle estimation.
•Error-state Kalman filter updates estimates, accounts for sensor orientation error.
•Experimental validation demonstrates superior accuracy compared to state-of-the-art methods.
AbstractObjectivesInertial Measurement Units (IMUs) are a valid alternative to optical tracking systems for human motion capture, but they are subject to several disturbances that limit their accuracy. We aim to improve the accuracy of elbow joint angle estimation from IMU measurements by introducing a novel postprocessing algorithm that uses anatomical constraints and does not require any prior calibration or knowledge of anthropometric parameters.
Materials and MethodsWe propose a new error model that addresses sensor misalignment and fusion errors. We use an error state extended Kalman filter (ESEKF) with state constraints to integrate the anatomical constraints. We validate the proposed algorithm by testing it in different scenarios and comparing it with a state-of-the-art optical tracking system.
ResultsThe research results highlight the superior performance of the proposed method compared with existing techniques. The study demonstrates a significant reduction in errors, particularly in complex arm movements and under strong external disturbances. The results obtained in the three different tested scenarios underscore the robustness and effectiveness of the developed algorithm, reaching half the error committed by the existing calibration-free correction algorithms proposed in the literature.
ConclusionsThe developed technique provides highly accurate estimates of joint angles in several challenging real-world scenarios.
Graphical abstract Download : Download high-res image (131KB)Download : Download full-size imageKeywords
Download : Download high-res image (131KB)Download : Download full-size imageKeywordsHuman motion
Joint angle estimation
Inertial sensors
Anatomical Constraints
© 2024 AGBM. Published by Elsevier Masson SAS.
留言 (0)