
















記住我




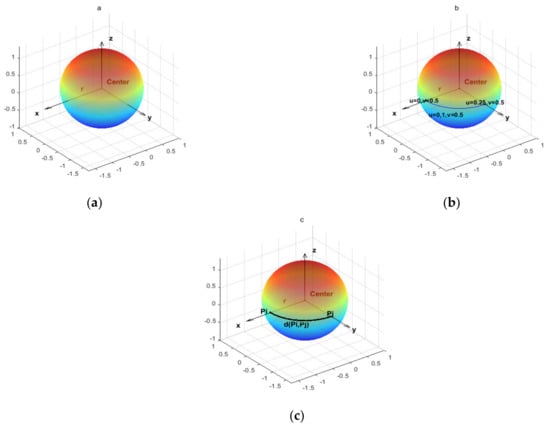

Figure 1. Detailed structural schematic of the dual-arm continuum robot: (a) is the overall structure of the continuum robot with the extended dual continuum arms, (b) is the internal structure of the actuation pack, (c) is the actuation principle for the continuum arms, (d) is the cable guiding system for controlling the continuum arm and gripper, (e) is the actuation system for the grinder.
Figure 1. Detailed structural schematic of the dual-arm continuum robot: (a) is the overall structure of the continuum robot with the extended dual continuum arms, (b) is the internal structure of the actuation pack, (c) is the actuation principle for the continuum arms, (d) is the cable guiding system for controlling the continuum arm and gripper, (e) is the actuation system for the grinder.
Figure 2. Detailed structural schematic of the dual-arm continuum robot: (a) is the overall structure of the continuum robot with the extended dual continuum arms, (b) is the internal structure of the actuation pack, (c) is the actuation principle for the continuum arms, (d) is the cable guiding system for controlling the continuum arm and gripper.
Figure 2. Detailed structural schematic of the dual-arm continuum robot: (a) is the overall structure of the continuum robot with the extended dual continuum arms, (b) is the internal structure of the actuation pack, (c) is the actuation principle for the continuum arms, (d) is the cable guiding system for controlling the continuum arm and gripper.
Figure 3. Kinematic definition of the continuum robot formed by three sections: (a) definition of the bending and phase angles, which are parameters for the constant curvature bending model of each section; (b) section view of a typical disk that makes up each segment; (c) kinematic relationship of adjacent disks within each section.
Figure 3. Kinematic definition of the continuum robot formed by three sections: (a) definition of the bending and phase angles, which are parameters for the constant curvature bending model of each section; (b) section view of a typical disk that makes up each segment; (c) kinematic relationship of adjacent disks within each section.
Figure 4. Cooperative workspace of the dual-arm continuum robot: (a) is the overall view of the workspace for the two continuum robots; (b) is the section view of the cooperative workspace. Note: for visibility, the bending ranges for the three sections of the two continuum robots in (a) are 30°, 45°, and 60°, respectively, while it is 90° in (b). The phase angles are within [0°, 360°] in both (a,b).
Figure 4. Cooperative workspace of the dual-arm continuum robot: (a) is the overall view of the workspace for the two continuum robots; (b) is the section view of the cooperative workspace. Note: for visibility, the bending ranges for the three sections of the two continuum robots in (a) are 30°, 45°, and 60°, respectively, while it is 90° in (b). The phase angles are within [0°, 360°] in both (a,b).
Figure 5. Operating principle of the dual-arm continuum robot in the remote sample removal case study. One arm with the gripper at the end holds the structure, while the other arm with the grinder moves along the planned path to cut the sample from the structure (see the enlarged view).
Figure 5. Operating principle of the dual-arm continuum robot in the remote sample removal case study. One arm with the gripper at the end holds the structure, while the other arm with the grinder moves along the planned path to cut the sample from the structure (see the enlarged view).
Figure 6. Optimization-based path planning for the 6-DoF continuum arm: (a,b) are the error definitions of the position and orientation.
Figure 6. Optimization-based path planning for the 6-DoF continuum arm: (a,b) are the error definitions of the position and orientation.
Figure 7. Toolpath planning strategy for the cutting operation in the sample removal case study: (a) is the toolpath definition (section view is selected); (b) is the overall view of the toolpath to show the configuration of the arm at different relative positions.
Figure 7. Toolpath planning strategy for the cutting operation in the sample removal case study: (a) is the toolpath definition (section view is selected); (b) is the overall view of the toolpath to show the configuration of the arm at different relative positions.
Figure 8. Results of the optimization-based algorithm for the inverse kinematic calculation of the 6-DoF continuum arm at each point along the toolpath: (a–c) are the front view, side view, and top view of the arm, respectively. Note: there are no constraints for the phase angle (φi, i=1,2,3) of the three sections, and the actuation system is omitted for clarity.
Figure 8. Results of the optimization-based algorithm for the inverse kinematic calculation of the 6-DoF continuum arm at each point along the toolpath: (a–c) are the front view, side view, and top view of the arm, respectively. Note: there are no constraints for the phase angle (φi, i=1,2,3) of the three sections, and the actuation system is omitted for clarity.
Figure 9. Change in shape parameter for each section of the arm and the optimization accuracy: (a) is the variation of the bending angle and phase angle of the three sections; (b) is the deviation between the calculated path and desired path. Note: the error is obtained by calculating the distance between the desired path and the planned path (error = Δx2+Δy2+Δz2).
Figure 9. Change in shape parameter for each section of the arm and the optimization accuracy: (a) is the variation of the bending angle and phase angle of the three sections; (b) is the deviation between the calculated path and desired path. Note: the error is obtained by calculating the distance between the desired path and the planned path (error = Δx2+Δy2+Δz2).
Figure 10. Change in shape of the 6-DoF continuum arm while the end effector moves along the toolpath with the additional constraints of the phase angle.
Figure 10. Change in shape of the 6-DoF continuum arm while the end effector moves along the toolpath with the additional constraints of the phase angle.
Figure 11. Shape parameters of the 6-DoF continuum arm and the optimization accuracy: (a) is the bending angle and phase angle as the end effector moves from point to point; (b) is the position error at each point.
Figure 11. Shape parameters of the 6-DoF continuum arm and the optimization accuracy: (a) is the bending angle and phase angle as the end effector moves from point to point; (b) is the position error at each point.
Figure 12. Experimental setup for demonstrating the collaborative operation algorithm: (a) is the overall operation setup of the dual-arm continuum robot; (b) is the actuation system (i.e., motor units, controllers, and communications); (c) shows the arrangement of the cutting tool; (d,e) are the 2-DoF universal joint and flexible hinge, respectively.
Figure 12. Experimental setup for demonstrating the collaborative operation algorithm: (a) is the overall operation setup of the dual-arm continuum robot; (b) is the actuation system (i.e., motor units, controllers, and communications); (c) shows the arrangement of the cutting tool; (d,e) are the 2-DoF universal joint and flexible hinge, respectively.
Figure 13. Flowchart of the collaborative operation strategy for the dual-arm continuum robot system.
Figure 13. Flowchart of the collaborative operation strategy for the dual-arm continuum robot system.
Figure 14. Path planning of the collaborative continuum robots for the remote sample removal from a structure: (a) is the initial configuration of the two 6-DoF continuum arms; (b,c) are the moving path and grinding path of the gripper and grinder continuum arms, respectively; (d,e) are the returning paths of the gripper and grinder continuum arms, respectively.
Figure 14. Path planning of the collaborative continuum robots for the remote sample removal from a structure: (a) is the initial configuration of the two 6-DoF continuum arms; (b,c) are the moving path and grinding path of the gripper and grinder continuum arms, respectively; (d,e) are the returning paths of the gripper and grinder continuum arms, respectively.
Figure 15. Shape of the collaborative continuum arms during operation calculated proposed optimization-based inverse kinematic algorithm: (a,b) display the shape of the continuum arm with the grinder, (c,d) display the shape of the continuum arm with the gripper, (e,f) show the shape of the two 6-DoF continuum arms working collaboratively. Note: the axis of both end effectors is along the Z axis in this case study.
Figure 15. Shape of the collaborative continuum arms during operation calculated proposed optimization-based inverse kinematic algorithm: (a,b) display the shape of the continuum arm with the grinder, (c,d) display the shape of the continuum arm with the gripper, (e,f) show the shape of the two 6-DoF continuum arms working collaboratively. Note: the axis of both end effectors is along the Z axis in this case study.
Figure 16. Experimental setup of the collaborative dual-arm robotic system and experimental results: (a) snapshot of the system with one arm holding the structure while the other arm conducts the cutting operation for the material removal; (b) experimental result between the desired toolpath and the actual toolpath.
Figure 16. Experimental setup of the collaborative dual-arm robotic system and experimental results: (a) snapshot of the system with one arm holding the structure while the other arm conducts the cutting operation for the material removal; (b) experimental result between the desired toolpath and the actual toolpath.
Table 1. Structure parameters of the continuum robot.
Table 1. Structure parameters of the continuum robot.
ParametersLength (mm)Diameter (mm)Hinge Width (mm)Hinge Thickness (mm)Section-11504041Section-21804351Section-32104661
留言 (0)