
記住我


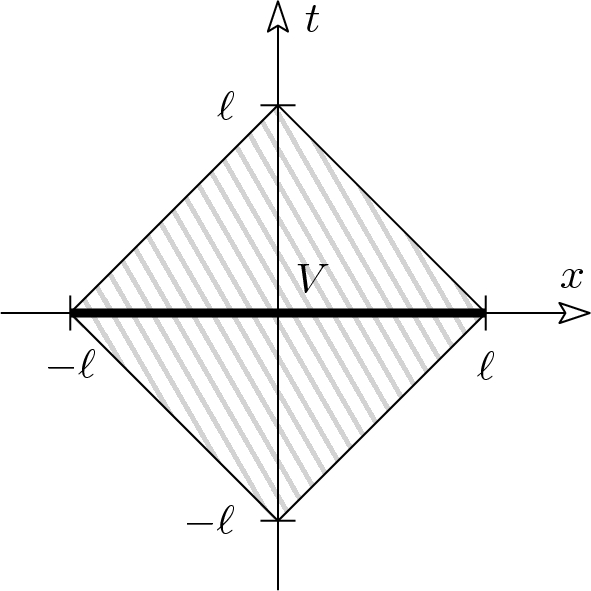
Consider the context of n-dimensional entanglement bootstrap. We derive an equivalence relation on the definition of quantum dimensions (Lemma 15) for immersed sphere shells in n-dimensions, where \(n \ge 2\) and is arbitrary. It applies to immersed annuli as a special case (\(n=2\)).
Because the setup is general, we introduce some diagrammatic notation for the partitions. Let \(Z = S^\times }\) be a sphere shell in n space dimensions, where \(S^\) is a \((n-1)\)-sphere and \(}\) is an interval. In Fig. 15, the horizontal direction indicates the direction of the interval \(}\). Therefore, each vertical strip that connects the top and the bottom represents a sphere shell. If a strip is cut in half (top and bottom), each piece is a half-sphere shell (topologically a ball). Note that Z is sectorizable, and thus \(\Sigma (Z)\) is a simplex. We denote the superselection sectors associated with the extreme points of \(\Sigma (Z)\) as \(}_Z\).
Fig. 15
Partitions of a sphere shell \(Z= S^ \times }\). The horizontal direction is the direction of the interval \(}\)
We start with a useful fact. An element \(\rho _Z\) of \(\Sigma (Z)\) is an extreme point if and only if
$$\begin \Delta (\partial Z, Z\setminus \partial Z)_=0. \end$$
(37)
Here \(\partial Z\) is the thickened boundary of Z, which is BD in the partition Fig. 15a. \(Z\setminus \partial Z\) is the interior of Z, which is C in the same partition. This condition is the extreme point criterion [15, 16].
Lemma 15The following are equivalent definitions of quantum dimension \(d_h\) of \(h\in }_Z\), where Z is an immersed sphere shell in n-dimension.
(a)\(\Delta (B,C,D) = 2 \ln d_h\) for the partition in Fig. 15a.
(b)\(\Delta (B,C,D) = 2 \ln d_h\) for the partition in Fig. 15b.
(c)\(\Delta (B,C,D) = 4 \ln d_h\) for the partition in Fig. 15c.
(d)\(I(A:C|B) = 2 \ln d_h\) for the partition in Fig. 15d.
RemarkWe shall see in the proof that we do not need to deform the annulus. Therefore, Lemma 15 holds not only for sphere shells immersed in a sphere but also applicable to the context that the sphere shells are immersed in other topological manifolds.
Fig. 16
Partitions used in the proof of Lemma 15. In a and b, the convention is the same as that in Fig. 15. (a’) illustrates the partition of (a) in the concrete case that \(Z=X_8\) is the “figure-8”
ProofFirst, we consider the partition in Fig. 16a, where \(Z=A B C D E F\). By the strong subadditivity, \(\Delta (B,C,DE)_ \ge I(A:C|B)_\). Furthermore, because \(\rho _Z^h\) is an extreme point of \(\Sigma (Z)\), it factorizes as \(\rho _^h = \rho _^h\otimes \rho _F^h\), which implies
$$\begin \Delta (B, C, D E)_=\Delta (B, C, D E F)_. \end$$
(38)
The extreme point \(\rho ^h_Z\) of \(\Sigma (Z)\), satisfies \(\Delta (\partial Z, Z\setminus \partial Z)_=0\), by the “extreme point criterion”. It implies
$$\begin \begin S_&= S_Z+S_, \\ S_&=S_Z+S_, \end \end$$
(39)
where the first line follows letting \(\partial Z\) be CDEF. The second line uses \(0 = \Delta (EF, ABCD) \ge \Delta (DEF, ABC)\).
Therefore, combining (38) and (39), we get
$$\begin \begin \Delta (B, C, D E)_&=\Delta (B, C, D E F)_ \\&= \left( S_-S_B+S_-S_\right) _ \\&= \left( S_-S_B+S_-S_\right) _\\&= I(A: C | B)_. \end \end$$
(40)
Thus, among the statements in Lemma 15, (a) and (d) are equivalent. Similarly, (b) and (d) are equivalent. Therefore, the three statements (a), (b), and (d) in Lemma 15 are equivalent.
The next step is establishing the equivalence between statement (c) and the rest. For this purpose, we consider Fig. 16b, where \(Z=BCDD'E\). We will show:
$$\begin \Delta (B,CD'E,D)_ = \Delta (B,C,DD')_. \end$$
(41)
Then, because the extreme point \(\rho ^h_Z\) factorizes as a tensor product on the left of E and right of E, we have \(\Delta (B,CD'E,D)_ = \Delta _L + \Delta _R\). \(\Delta _L\) and \(\Delta _R\) give contributions identical to conditions (a) and (b) of Lemma 15. Thus, the claimed result holds.
The rest of the proof is the justification of (41). In fact, this is a special case of the decoupling lemma (Lemma D.1 of [16]). Nonetheless, we spell out the details so readers do not need to read the more general decoupling lemma.
All regions below are those in Fig. 16b. Because \(\rho ^h_Z\) is an extreme point, it satisfies
$$\begin \begin S_&= S_ - S_C + S_ \\ S_&= S_ - S_ + S_ \\ S_ + S_&= S_\\ 0&= S_ - S_C + S_. \end \end$$
(42)
The first and second lines follow from the vanishing of conditional mutual information, bounded by the extreme point criterion: (1st line) \(0= \Delta (C,D'E)_ \ge I(B:D'E|C)_\), (2nd line) \(0= \Delta (D',E)_ \ge I(CD:E|D')_\). The third line is because any extreme point is factorized into a tensor product along disjoint shells arranged in the interval \(}\) direction. The fourth line is \(\Delta (C,D'E)_=0\), also by the extreme point criterion. Therefore,
$$\begin \Delta (B, CD' E, D)_&= S_ + S_ - S_B - S_D \nonumber \\&= (S_ - S_ + S_) + (S_ - S_ + S_) \nonumber \\&\qquad - S_B - S_D \nonumber \\&= S_ + (S_ - S_C + S_) + S_ - S_B \nonumber \\&\qquad - (S_ + S_D) \nonumber \\&= S_ + S_ - S_B - S_\nonumber \\&= \Delta (B,C,DD')_. \end$$
(43)
The brackets in the middle steps are replacements according to Eq. (42). This completes the proof. \(\square \)
Lemma 15 implies that \(d_h \ge 1\), for any superselection sector h detected by a sphere shell. Such superselection sectors are associated with point excitations. It is worth noting that, in \(n \ge 3\), not every type of superselection sector is associated with point excitations, and many of them are not detected by sphere shells. The general definition of quantum dimension for immersed sectorizable regions is currently lacking. Nonetheless, a generalization is known for regions participating in a pairing [17].
Automorphism of Information Convex Sets: Tools and ExamplesAutomorphism (i.e., self-isomorphism) of information convex sets plays an important role in entanglement bootstrap. The simplest application is the definition of antiparticles, but its implication is much broader. In this appendix, we talk about two things related to automorphisms of information convex sets.
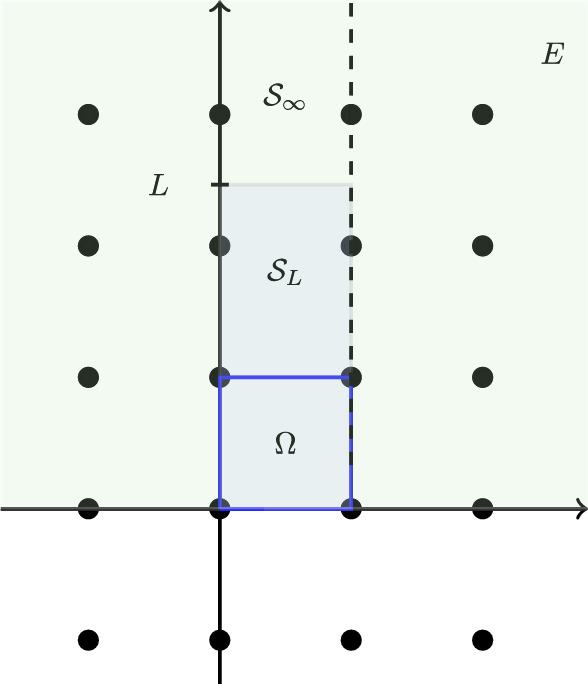
In Sect. B.1, we introduce a “immersion complex” \(}(\omega ,N)\) (Definition 16). It is a simplicial complex whose points represent immersed regions. It is an attempt to provide a compact mathematical way to describe two things: (i) topological classes of immersion (\(\omega \) into N) by counting the connected component (\(\pi _0\)) of \(}\), and (ii) the topological classes of deformation of an immersed region \(\Omega \looparrowright N\) back itself (keeping the intermediate configurations immersed), as the fundamental group (\(\pi _1\)) of a connected component of \(}\). In Sect. B.2, we utilize tunneling (Sect. 3.1) to make automorphisms not available otherwise.
1.1 Math Related to Immersion and Deformation ClassesConsider the immersion of an n-dimensional space with boundary into another, \(\Omega \looparrowright N\). Let the homeomorphism class of \(\Omega \) be \(\omega \). In our convention, \(\Omega \) knows all the data of the immersed region while \(\omega \) forgets everything but the homeomorphism class. (We intend to first describe the mathematical problem and postpone the physical relevance to automorphisms of information convex sets and examples in the latter part of the section.)
Let \(}(\omega ,N) = \\) be the set of representatives of equivalence classes of immersion of \(\omega \) into N. That is
1.\(\Omega _i(\omega ) \looparrowright N\) for any i;
2.\(\Omega _i(\omega ) \overset\ \Omega _j(\omega )\) if \(i \ne j\);
3.\(\Omega _i(\omega )\) is homeomorphic to \(\omega \) for any i;
4.any \(\Omega \looparrowright N\) homeomorphic to \(\omega \) must satisfy \(\Omega \overset\ \Omega _i(\omega )\) for some i.
Here, \(Y \overset\ Z \) means two immersed regions \( Y, Z \looparrowright N\) can be smoothly deformed to each other on N, where the intermediate configurations are immersed. In particular, if there is no way to immerse \(\omega \) to N, \(}(\omega ,N) = \emptyset \). Now we are ready to introduce the “immersion complex”.
Definition 16(Immersion complex). Let \(\omega \) and N be two n-dimensional manifolds, possibly with boundaries. We define the immersion complex \(}(\omega , N)\) as
$$\begin }(\omega , N) \equiv \coprod _}(\omega , N)} }(\Omega , N). \end$$
(44)
Here, \(\coprod \) means disjoint union (of topological spaces), and \(}(\Omega , N)\), for any \(\Omega \looparrowright N\), is the simplicial 2-complex such that
1.\(\Omega '\looparrowright N\) represents a point (0-simplex) of \(}(\Omega , )\) if and only if \(\Omega ' \overset\ \Omega \).
2.Two distinct points \(\Omega ,\Omega ' \in }(\Omega , )\) are connected by a 1-simplexFootnote 15 of \(}(\Omega , )\) if and only if \(\Omega \cap \Omega '\) can be converted to \(\Omega \) and \(\Omega '\) by two sequences of extensions (one for each).
3.Three distinct points \(\Omega ',\Omega '',\Omega ''' \in }(\Omega , )\) are connected by a triangle (2-simplex) of \(}(\Omega , )\) if and only if both of the following holds
\(\Omega \cap \Omega ' \cap \Omega ''\) can be converted to \(\Omega \cap \Omega '\), \(\Omega ' \cap \Omega ''\) and \(\Omega \cap \Omega ''\) by three sequences of extensions (one for each).
Points in each of the three pairs \((\Omega ,\Omega ')\), \((\Omega ',\Omega '')\) and \((\Omega ,\Omega '')\) are connected by a 1-simplex of \(}(\Omega , )\), according to rule 2 above.
RemarkWe emphasize that the definition above serves as an attempt to formulate the mathematical problem, but we do not claim it has the desired mathematical rigor. Even if it does, we do not know if it is the most convenient to work with. In practice, it is likely to be useful to take some cellular decomposition of manifold N and only consider only “large but finite-sized” immersed regions \(\Omega \). By doing so, the number of 1-simplex connecting a given point will be finite. (This setup is also similar to entanglement bootstrap, where the manifold N will be interpreted as the manifold on which we define the reference state, and thus N is equipped with a coarse-grained lattice.)
By definition \(}(\Omega , N) = }(\Omega ', N)\) if \(\Omega ' \overset\ \Omega \). Furthermore, \(}(\Omega , N)\) must be connected. Therefore, \(}(\omega , N)\) is the disjoint union of these connected components. Also, by definition, for any triangle of \(}(\Omega , N)\), its three edges must be included in \(}(\Omega , N)\), and for any 1-simplex of \(}(\Omega , N)\) its two endpoints must be included in \(}(\Omega , N)\). This means both \(}(\Omega , N)\) and \(}(\omega , N)\) are simplicial 2-complexes.
RemarkOne may ask if it is meaningful to add higher dimensional k-simplexes (\(k\ge 3\)) instead of stopping at \(k=2\). The relevance to physics we can think of so far (as we explain shortly) depends on \(\pi _0\) and \(\pi _1\). Adding higher dimensional simplexes will not change them. Nonetheless, it remains an interesting question if higher homotopy (or homology) groups of \(}\) can provide further information.Footnote 16
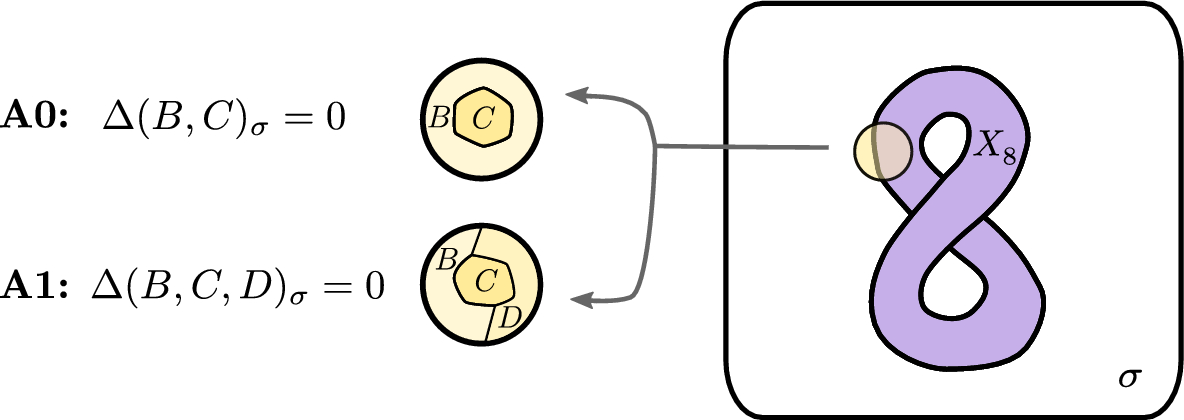
1.1.1 Physical Relevance of Immersion Complex Through the Homotopy GroupsIt is easy to explain why the number of connected components \(\pi _0\) of \(}(\omega , N)\) is of physical relevance. Consider the entanglement bootstrap setup where N is the manifold on which we define our reference state \(\sigma _N\). The n-dimensional version of axioms A0 and A1 are satisfied everywhere on N. Then \(\pi _0(}(\omega , N))\), i.e., the number of connected components of \(}(\omega , N)\), is the number of inequivalent immersions of the topological space \(\omega \) in N. For instance, \(\pi _0(}(\text , S^2))\) has two elements.Footnote 17 We discussed this in the main text without using this notation. In broader contexts, \(\pi _0(})\) is the set of regular homotopy classes of immersed regions, which has been a topic of study in topology; see, e.g., [30, 41, 42]. Within each connected component, \(}(\Omega ,N)\), \(\Omega \in }(\omega ,N)\), we can smoothly deform the region and the isomorphism theorem implies that such deformation preserves the information convex set. Configurations in two connected components are harder to relate, although tunneling (Sect. 3.1) provides one way to generate isomorphisms between such configurations (when a certain Abelian sector exists).
The fundamental group of the connected components of \(}\), i.e., \(\pi _1(}(\Omega ,N))\), by (44) is relevant to the study of automorphism of information convex sets:
Immersed regions up to small deformations are represented by nearby points connected by 1-simplex in \(}(\Omega ,N)\). For each oriented loop \(\mathbf \) in \(}(\Omega ,N)\) that starts at \(\Omega \) and ends at \(\Omega \), we have an associated automorphism:
$$\begin \Phi (\mathbf ):\quad \Sigma (\Omega ) \rightarrow \Sigma (\Omega ). \end$$
(45)
The reason (45) makes sense is that each oriented 1-simplex connecting two adjacent points \(\Omega \) and \(\Omega '\), defines the following isomorphism \(\Sigma (\Omega ) \rightarrow \Sigma (\Omega ') \): we first reduce states in \(\Sigma (\Omega ) \) to \(\Omega \cap \Omega '\) by elementary steps of restrictions, and then we extend the support of these states to \(\Omega '\) by elementary steps of extensions. These steps are isomorphisms between information convex sets. After we apply these isomorphisms on \(\mathbf \), in a sequence given by the orientation, we generate a unique automorphism (45).
Triangles (2-simplex) are the places where the loop can deform (\(\mathbf \rightarrow \mathbf '\)) without affecting the automorphism. We illustrate the deformation as

where only part of the loops \(\mathbf \) and \(\mathbf '\) in the neighborhood of the triangle are shown. The fact that \(\Phi (\mathbf ) = \Phi (\mathbf ')\) can be checked from (Definition 16) and the discussion below Eq. (45).
We therefore argue that \(\pi _1(}(\Omega ,N))\) is the information that determines the nontrivial classes of deformation of immersed region \(\Omega \) back to itself in the background manifold N. Automorphisms of \(\Sigma (\Omega )\) coming from smooth deformations can be different only if two closed loops \(\mathbf \) and \(\mathbf '\) (both pass \(\Omega \)) represent two different elements of \(\pi _1(}(\Omega ,N))\). In particular, if the loop \(\mathbf \) can shrink to a point on \(}(\Omega ,N)\), the associated automorphism \(\Phi (\mathbf )\) must be the (trivial) identity map.
1.1.2 ExamplesWe give a few simple examples to illustrate the immersion complex (Definition 16) and discuss its physical relevance. Recall
$$\begin }(\omega , N) \equiv \coprod _}(\omega , N)} }(\Omega , N), \end$$
(47)
where \(}(\omega , N)\) is the set of representatives of immersed regions homeomorphic to \(\omega \), immersed in N. Our first example is about annuli immersed in a disk. Let \(\omega \) be the annulus and \(N= B^2\) be the disk.
$$\begin }(\text , B^2) = \coprod _^ }(X(j),B^2), \end$$
(48)
where X(j) for \(j \ge 0\) represents an immersed annulus with turning number j. In particular, we can let \(X(0) = X_8\) be the immersed “figure-8” and let \(X(1) = X\) be the embedded annulus. We expect \(}(X, B^2)\) to be simply connected and \(\pi _1(}(X, B^2))\) is trivial.Footnote 18 What is \(\pi _1(}(X_8, B^2))\)? From the way to turn the figure-8 inside out by a \(180^\circ \) rotation showing in Eq. (12), we see that \(\pi _1(}(X_8, B^2))\) has a quotient group \( }_2\). However, from Ref. [43], we anticipate that \(\pi _1(}(X_8, B^2))= }\).Footnote 19
The second example is about annuli immersed in a sphere.
$$\begin }(\text , S^2) = }(X,S^2) \coprod }(X_8,S^2), \end$$
(49)
where X and \(X_8\) are the only two classes of immersed annuli in the sphere (as discussed in Table 1). Thus \( }(\text , S^2) \) has two connected components. What are the fundamental groups \(\pi _1\) of the connected components? We anticipate that \(\pi _1(}(X,S^2))\) has a quotient group \(}_2\). The related observation is that X can turn inside out on the sphere and the fact that such process can turn an anyon \(a\in }\) into anti-anyon \(} \in }\), which is, in general, a different sector. (For a related discussion, see Appendix G of [14].) It is worth understanding if \(\pi _1(}(X,S^2))\) itself is \(}_2\). Similiarly, for the figure-8 annulus \(X_8\), it is worth understanding if \(\pi _1(}(X_8,S^2))\) is \(}_2\); if this is true, the definition of anti-sector on \(X_8\), considered in Eq. (12) is justified.
One simple example in 3-dimensional space is
$$\begin }(\text , B^3) = }(Z,B^3), \end$$
(50)
where Z, on the right-hand side, represents the embedded sphere shell in the 3-dimensional ball \(B^3\). Equation (50) follows from the fact that there is a unique way to immerse a sphere \(S^2\) in \(B^3\) (or \(R^3\)), up to regular homotopy; this is an influential early result by Smale [41], which is also the topic of video [31]. We are wondering if \(\pi _1(}(Z,B^3)) = }_2\); if this is the case, all methods of turning a sphere inside out must be topologically equivalent. It is further interesting to consider
$$\begin }(\text -g\text , B^3) = }(G_g,B^3), \end$$
(51)
where \(G_g\) is an embedded genus-g handlebody and g is a positive integer. As is indicated in Eq. (51), \(}\) is connected in this example. Genus-g handlebodies detect the “graph excitations” studied in [16, 17], where for \(g=1\) these graph excitations are flux loops. In general, \(\pi _1(}(G_g,B^3))\) can have nontrivial structure even though \(G_g\) are sectorizable regions.
Fig. 17
Illustrated is a deformation process, which corresponds to an oriented loop in \(}(X, X_+)\). Here, X is an annulus (thick black loop in the top figure) embedded in a wider annulus \(X_+\) (gray)
Our last example is in 2D, where the background N is an annulus. Consider an annulus X embedded in an annulus \(N= X_+\) that thickens X, as shown in Fig. 17. We ask
$$\begin \pi _1( }(X, X_+)) = ? \end$$
(52)
Note that, \(\pi _1( }(X, X_+))\) can be nontrivial even if \( }(X, B^2)\) is trivial. Intuitively, in the process described in Fig. 17, a pair of twists are created locally and then transported around the annulus before they annihilate again. (The process in Fig. 17 is inspired by Fig. 8 of [42] as well as Fig. 7 of [20].) Can this process represent a nontrivial element of \(\pi _1( }(X, X_+)) \)? We do not know the answer. If this process indeed corresponds to a non-contractible loop in \(}(X, X_+)\), it may have nontrivial physical consequences in contexts with topological defects. Recall that references state on annulus \(X_+\) may come from a system with a defect line that passes through \(X_+\) as discussed in Sect. 5.
In summary, the problem we try to formulate in this section is meant to be a pure topology problem. This problem is carefully separated from the study of quantum states on such regions. Nonetheless, we believe this problem is a crucial mathematical problem that will help us gain a clear understanding of the automorphism of information convex sets. We wonder if the existing tools in math literature are enough to produce answers to these questions. The question on \(\pi _0(}(\omega ,N))\) is essentially the classification of immersion up to regular homotopy. Some related results can be looked upFootnote 20 in existing math papers e.g., [41,42,43]. To our knowledge, the fundamental group \(\pi _1(}(\Omega ,N))\), e.g., for examples listed above, has not been studied in math literature in any systematic way. (That is why we only provided guesses to most answers!) In any case, entanglement bootstrap provides (adds) a motivation for the study of such mathematical objects.
1.2 Automorphisms Utilizing TunnelingTunneling trick (Sect. 3.1) provides extra isomorphism of information convex sets by “large changes” of the region, such as adding or removing a twist on a 1-handle. This is in contrast with the smooth deformation built from elementary steps. Tunneling is not described by lines in \(}(\Omega ,N)\). The tunneling trick, as described in the main text, works for the specific context of 2D. Below, we broaden the meaning of tunneling and use it to refer to any “large change” of an immersed region (together with the associated information convex set).
By allowing both smooth deformations and tunneling, we can obtain more diverse classes of automorphisms of \(\Sigma (\Omega )\). We will not discuss the entire scope of how this might work, acknowledging that it is an interesting mathematical problem. Instead, we describe a nontrivial example in 2D.
Let \(}\) be a punctured torus immersed in a disk \(B^2\), as shown in the left figure of Fig. 18. If there is an Abelian sector on figure-8 region, \(\mu \in }_8\), then we can design an automorphism of \(\Sigma (})\) utilizing the tunneling trick in one of the steps; see the process shown in Fig. 18. The entire process takes the immersed punctured torus \(}\) back to itself. Steps 1 and 2 are smooth deformations.Footnote 21 Step 3 is a tunneling. Thus, the automorphism cannot be associated with a closed loop in \(}(}, B^2)\).
Can we make use of the topological process in Fig. 18 to understand nontrivial universal properties of gapped topologically ordered phases? We anticipate that the answer is yes. An idea is to relate this to the problem of defining and extracting topological spins from a single wave function; we postpone the discussion to future work.
Strong Isomorphism Conjecture in Arbitrary DimensionsHere is the statement of strong isomorphism conjecture for an arbitrary space dimension n, generalizing \(n=2\) case (Conjecture 9) in the main text. We denote the n-dimensional sphere on which we define the reference state as \(}^n\). Axioms A0 and A1 are satisfied everywhere.
Conjecture 17Suppose two immersed regions \(\Omega ,\Omega ' \looparrowright }^n\) are homeomorphic, then
$$\begin \Sigma (\Omega ) \cong \Sigma (\Omega '). \end$$
(53)
Fig. 18
Automorphism of the information convex set of an immersed punctured torus, where tunneling is used. The punctured torus is visualized as an annulus (horizontal, gray) with a 1-handle (black) connecting both boundaries of the annulus
Suppose this conjecture is true, then we have similar beliefs (as 2D, discussed in the discussion section) that the explicit isomorphisms that come up during the proof can be informative and useful in extracting universal information of the emergent topological quantum field theory associated with the reference state.
Besides, the strong isomorphism conjecture (Conjecture 17) seems to resonate with another basic question: “What is the definition of the quantum dimension for a superselection sector associated with an arbitrary immersed sectorizable region \(S \looparrowright }^n\)?” For dimensions \(n \ge 3\), this question is open. Many (if not all) nontrivially immersed S have an embedded version \(S^\star \hookrightarrow }^n\), where \(S^\star \) is in the homeomorphism class of S. Since \(S^\star \) is embedded, the quantum dimension of a superselection sector \(I \in }_\) (characterized by \(\Sigma (S^\star )\)) can be defined from the entropy difference of an extreme point \(\rho ^I\) with the vacuum \(\sigma \):
$$\begin d_I \equiv \exp ^I)-S(\sigma _)}\right) }, \quad I \in }_. \end$$
(54)
While Eq. (54) is familiar in early works, we are still interested in knowing if \(d_I \ge 1\) in general. Nontrivial checks from 3D and gapped domain walls are consistent with \(d_I \ge 1\), but the general proof for an arbitrary n is lacking. This puzzle can be restated as a question about the vacuum state: “Does the vacuum state have the absolute minimum entropy among states in \(\Sigma (\Omega )\), for any \(\Omega \hookrightarrow }^n\)?” We would like to conjecture the affirmative direction.
留言 (0)