
記住我









In nature, finding, locating, and recognizing odor information is a fundamental skill for organisms. For example, foraging ants can use residues of pheromones to establish the shortest route back from a food source (Hölldobler et al., 1990), and male moths discover and find mates by tracking the odor released by female moths (Charlton and Cardé, 1990). Inspired by the biological phenomena, since the 1990's, some scholars have started to study how to use mobile robots equipped with chemical sensors to “actively” sniff out odor for various tasks, such as odor map construction, odor source localization, and odor source classification. This type of research can be referred to as active olfaction in a broad sense. Odor source localization (OSL) is a process in which single or multiple mobile robots use sensors to “proactively” discover chemical plumes in the environment, track them, and identify the source of the odor.
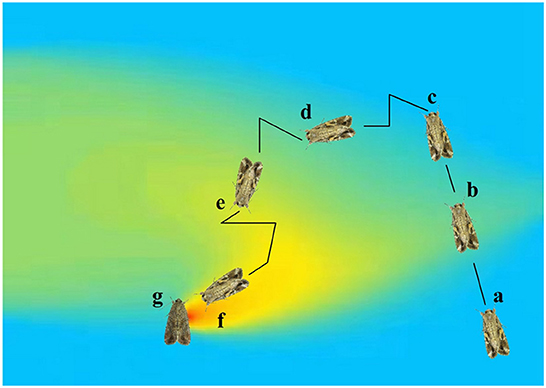
The gas molecules released by the odor source are blown away by the wind and will flutter in the air like a feather to form a trajectory, which is called a plume (Murlis et al., 1992). Typically, locating odor source can be divided into three subtasks (Hayes et al., 2002): plume finding, plume traversal, and source declaration. Plume finding is a process of initial contact with the odor. Due to the stochasticity of plumes, plume finding mainly uses a random search strategy. Plume traversal is a process of making robots follow the plume to the odor source. It requires robots to have more “professional” behavior. It should move toward the odor source, and simultaneously, it cannot detach from the coverage of the odor plume. Odor source declaration refers to the robot's confirmation that the current location is the odor source rather than a local optimum. This process does not necessarily use odor information, as typical odor sources can also be determined by other means (such as vision) at short distances. Additionally, a plume reacquiring stage (Li et al., 2006) was proposed to be activated when the robots appear to lose contact with the odor for a given period during tracking plume. Figure 1 shows a male moth (Spodoptera frugiperda) locates its mate by detecting and tracing the sex pheromone emitted from the female, experiencing four stages.
Figure 1. A male moth (Spodoptera frugiperda) (a) locates its mate by detecting and tracing the sex pheromone emitted from the female (g), experiencing four stages: Plume finding (b), plume reacquiring (d) after detaching from the odor coverage (c), plume traversal (e), and source declaration (f).
In the early years, active olfaction for odor source localization by mobile robots did not perform as well as the fixed sensor approach. An essential reason is that under general indoor ventilation conditions, odor diffusion is influenced by turbulence, making the distribution of plumes show complex characteristics such as time-varying, interval, and multi-extremum. However, mobile robots only used chemotaxis to collect concentration information for plume tracking, making them easily trapped in the maximum local odor concentration or too long to converge, leading to failure. Over the last two decades, many studies have been conducted to make the robot avoid local optima and improve the search performance of algorithms in turbulent plumes.
Currently, there are four mainstream methods for locating odor sources (Jing et al., 2021), viz., reactive methods, heuristic search methods, probabilistic inference methods, and learning methods. The heuristic search method treats odor source localization as a functional optimization problem, that is, finding the optimal odor concentration in a particular region. Therefore, the OSL problem can be transformed into an optimal optimization problem. Among heuristic search methods, the swarm intelligence (SI) algorithms have been considered as a promising approach for the following advantages:
• Swarm intelligence algorithms mainly complete the work of complex tasks through self-organization by a population of individuals with simple behavior. The simple search behavior of a single robot is the continuation of a reactive robot based on odor concentration.
• Swarm intelligence algorithms can coordinate multiple robots to search for odor sources and effectively solve the defects of a single robot in the process of odor source localization, such as poor robustness and quickly falling into a locally optimal solution.
• In contrast to probabilistic inference methods and learning methods, the swarm intelligence algorithm mainly achieves the optimal position of odor concentration by multiple iterations of multi-robot individuals. It does not require the continuity and derivability of odor concentration to fit with the plume concentration's discontinuous and multi-local optimal characteristics in a natural turbulent environment.
Therefore, since 2006, researchers have begun to apply swarm intelligence algorithms to odor source localization in mobile robots. This paper gives an overview of odor source localization, focusing on swarm intelligence algorithms applied to this area.
Why this review?So far, several investigations report on robot odor source localization have been published. Lilienthal et al. (2006) sorted out the literatures and published a review. However, the review was published more than a decade ago. The experiments mentioned were carried out in the indoor scenario, mainly considering the two-dimensional search space and classifying the applicable environmental conditions. The experimental conditions considered are still significantly different from those expected in most typical applications. It shows that the challenge in the future is to evaluate how to effectively combine different algorithms and test the corresponding implementation in a natural environment. Kowadlo and Russell (2008) pointed out that 3D localization will be further developed in the future, and more consideration will be given to obstacles and unstructured environments. Ishida et al. (2012) reviewed three subtasks of robotic odor localization. They argued that robotic OSL research has moved from the simulation and experimental stage to a more practical application-oriented stage, which is instructive for subsequent research. Chen and Huang (2019) used a new classification approach in their review: using algorithmic principles at the top level of the classification hierarchy, such as how to handle input signals (such as chemotaxis and anemotaxis), classified existing OSL algorithms into four categories, and noted that gradient-based algorithms currently lack attention and that probability and map-based algorithms are more attractive for research. In a recent review, Jing et al. (2021) pointed out that the classification method of the former may lead to some overlap between different categories and proposed a stricter classification method based on the principle of method according to the literatures published in recent years, and also emphasized some aspects not discussed in previous studies: in-situ sensing and simulator development for odor source direction and distance prediction. Meanwhile, they pointed out that the algorithm extensions to 3D environments, multiple robots, and their mixing situation have progressed in the past 10 years. Francis et al. (2022) recently published a review to overview the research on gas distribution mapping and source localization for both controlled and uncontrolled environments with robots, focusing on probabilistic algorithms developed for both single robot and multi-robot applications.
In recent years, more and more researchers have started to solve the OSL problem with swarm intelligence, and many significant research results have been achieved. However, to the best of our knowledge, review literature related to this has not been seen reported yet, so in this paper, we review multi-robot algorithms applied to odor source localization from the perspective of swarm intelligence. We review and discuss the main issues of odor source localization in turn in the last decade. The application of particle swarm optimization (PSO) algorithm and its improved algorithms are emphasized. Hybrid particle swarm algorithms combined with other independent algorithms will also be discussed. Various bio-inspired meta-heuristic optimization methods, which were not highlighted in the past reviews and are hot research trends in recent years, will be discussed separately.
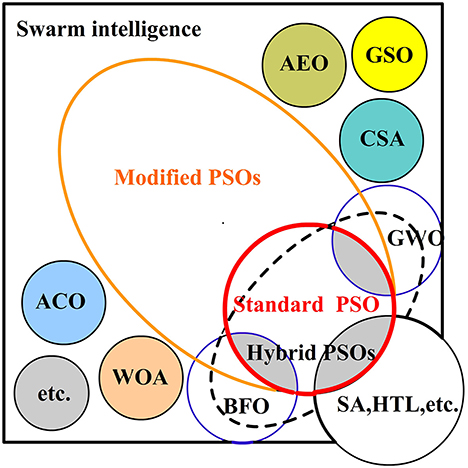
How to categorize algorithms?The existing swarm intelligence algorithms mainly applied to multi-robot system for odor source localization (Figure 2) are classified as follows according to the algorithm principle:
The standard PSO algorithm for OSL heavily relies on chemotaxis. Its inherent algorithm principle allows it to coordinate multiple robots, using current information, individual history information, and global history information to localize the target.
The modified PSO algorithms realize the optimization of the standard PSO to adjust particle position in the next iteration mainly by introducing more environment information (such as wind direction or velocity) or other useful characteristics (such as repulsion or sensor denoise), so that the PSO algorithms can be faster out of local optimum or suitable for multi-odor source localization, and so on.
The hybrid PSO algorithms are obtained through concatenating and incorporating PSO with other swarm intelligence algorithms in order to solve PSO defects such as premature convergence, falling into local optimum, slow convergence speed, and so on.
Other nature-inspired SI algorithms mainly imitate the behavioral strategies of individuals in certain groups of organisms in nature through local perception and behavioral communication to achieve foraging, migrating, and escaping from natural enemies, to implement collaborative discovery, tracking, and localizing of odor sources in multi-robot systems.
Figure 2. The diagram of existing swarm intelligence algorithms applied to multi-robot system for odor source localization.
The rest of this paper is organized as follows. Section Trending issues of robot OSL: An overview briefly discusses the trending issues of robot OSL. Section PSO and its variants in OSL: Origins and progress reviews the OSL methods based on PSO and its variants in detail. Section Other nature-inspired SI algorithms in OSL: Diversity and exploration reviews other swarm intelligence algorithms applied to robot OSL. Section Trends and challenges presents some trends and challenges in the future development of the robot active olfaction research. Finally, in last section, Conclusions are drawn.
Trending issues of robot OSL: An overviewAfter more than two decades of development, the researches on mobile robots' odor source localization have gone through a process from simplicity to complexity, theory to application, broadly in the following aspects.
Odor source: From single to multipleMost robot OSL studies were conducted in the early years for single-point odor source environments. However, in a realistic situation, there may be point or surface odor sources with unknown numbers and locations emitting the same gas in the search area (Li et al., 2015).
Unlike the case of a single odor source, using multiple robots to locate multiple sources faces the following new problems.
How to maintain the exploration-exploitation balance in the search processIn earlier approaches, studies tended to emphasize exploitation, which would lead to premature convergence of the robot population once the extrema were found. Too many robots gathered in the same region tend to lose the diversity of individuals (Ghalia, 2008). However, if too much emphasis is placed on exploration, the algorithm will slow down the convergence. The dilemma is an extremely challenge faced by all multi-robot systems and swarm intelligence is advantageous but still need strictly assess in vastly different circumstances (Kwa et al., 2022).
How to search multiple odor sources in parallelTraditional methods often take a sequential approach to locate multiple odor sources (Luo et al., 2008). In other words, only a single odor source can be located in a complete cycle (Zhang et al., 2015a), which affects the efficiency of odor source search.
How to avoid repeated searches for the same odor sourceSuch as how to issue a uniqueness statement for a specific odor source (Jatmiko et al., 2009b), determine whether the robot finds an existing odor source (Zhang J. et al., 2014), and how the robot swarm that finds an odor source continues searching for other odor sources.
To address the above shortcomings, some scholars have introduced the Niche technique into the OSL, which will be described in detail in the subsequent sections.
Airflow environment: From diffusion to turbulenceThe difference in the airflow environment signifies that the primary way of odor transmission is different. The current studies mainly focus on two types of environments: diffusion-dominated environment and turbulence-dominated environment.
In diffusion-dominated environment, where there is no turbulence, molecular diffusion becomes the determining factor for odor propagation, such as in the subsurface. Therefore, a simple gradient search can approach the odor source along the plume—most of the early studies used diffusion-dominated environment settings for simulation experiments.
In a turbulence-dominated environment, turbulent diffusion mainly affects odor transport, while molecular diffusion can be neglected (Smyth and Moum, 2001). The odor source forms a plume under the wind effect. The chaotic character of turbulence tends to cause random bending of the plume, producing vortices of different sizes. Large-scale vortices cause the entire plume to twist and wind, making tracking more complex (Yee et al., 1994), while small-scale vortices tear the plume into many filaments. Localized high concentration odor filaments can lead to localized abrupt concentration changes and concentration discontinuities (Kowadlo and Russell, 2008). In this environment, available wind speed/direction sensors can detect relatively accurate values, such as in general outdoor and ventilated indoor environments.
Another environment type is the weak fluid environment under turbulent dominance. In this environment, turbulence controls odors, but existing wind speed/direction sensors cannot obtain reliable data. For example, closed indoor environments do not exchange fluids with the outside world but generate weak convection through temperature differences. This environment is more demanding than others, and less relevant research is available.
In a turbulence-like dominant environment, discontinuous concentration gradients and sudden concentration shifts make it difficult for chemotaxis strategies to locate the odor source effectively anymore. Therefore, more sophisticated search strategies and algorithms are needed to escape the local optimum. The algorithms applicable to various airflow environments are described in more detail in the following section.
Reactive principle: From chemotaxis to chemotaxis-anemotaxisChemotaxis and anemotaxis are two ways mobile robots utilize environmental information.
Chemotaxis refers to a method of mimicking organisms to rely on the concentration of the pheromone to reach the odor source. The robot uses the concentration measurements at different locations to calculate the concentration gradient and locates the odor source by climbing the odor concentration gradient. Plume dispersion is a steady process when the odor source is placed in a laminar (i.e., low Reynolds number) environment, which results in spatially coherent plume trajectories (Wang and Pang, 2021). In this case, the chemotaxis is effective. However, the odor concentration gradient in the actual case is not as smooth as expected because turbulence-dominated odor plumes are usually produced with vortices, and vortices of different sizes disrupt the shape of the plume with a smooth concentration gradient, which renders chemotaxis ineffective in this environment (Wang and Pang, 2021). Therefore, the utilization of wind information becomes an essential clue for odor source localization.
Anemotaxis is the process of some organisms in nature (e.g., dung beetles and silkworm moths) approaching an odor source against the wind or upstream in foraging and eventually locating the odor source. Inspired by this, earlier researchers have proposed to use wind information of organisms for OSL studies, mainly the Zigzag approach (Ishida et al., 1994), Silkworm moth algorithm (Russell et al., 2003), and Spiral Surge algorithm (Hayes et al., 2002). However, these studies are conducted in specific environments such as wind tunnels. The localization of odor sources cannot be effectively performed in a natural turbulent environment. In the last decade, the methods of anemotaxis have gradually changed from using wind information to using wind speed information combined with wind direction information. The upwind search ensures that the robot does not waste time searching in the wrong direction, and the wind speed helps the robot to adapt to the dynamic turbulent environment, which improves the search efficiency. Representative methods include the WUI and WUII methods (Jatmiko et al., 2016), adding upwind terms (Feng et al., 2019b), etc. The swarm intelligence algorithms utilizing both chemotaxis and anemotaxis will be described in detail in Sections PSO and its variants in OSL: Origins and progress and Other nature-inspired SI algorithms in OSL: Diversity and exploration.
Agent: From individual to swarmEmbryonic single-robot active olfaction used a reactive principal to locating hazardous odor sources. Such robots acquire odor concentration signals through sensors, which trigger a preset sequence of behaviors for odor source search. The behavior of mobile robots often does not involve historical information, and the subsequent behavior of the robot is directly related to the sensor measurements in the present moment.
The benefits of using multiple robots in odor source localization are very intuitive. The OSL problem can be considered as the problem of finding the location of the maximum odor concentration in the target space. Therefore, it can be transformed into an optimization problem (Genovese et al., 1992). The global search in the target area can be completed faster and with a better multi-odor source search capability by using multiple agents. Compared to single robot, multiple robots require more “intelligent” algorithms to better plan robot swarm and avoid collisions with each other. Otherwise, multiple robots without mutual collaboration would instead cause degradation of search performance (Chen and Huang, 2019).
The following limitations are still present when using multi-robots to deal with the actual odor finding problem:
• Sensor cost limitations. The odor sensors employed in multi-robot systems cannot be too expensive. The response and recovery time of the sensors is slow, and the accuracy is not high.
• Working environment limitations. In the natural environment, there are often differences between the coordinate position values given by the robot positioning system and the actual position the robot is in, and the robots are prone to collision with each other;
• Sensor installation location limitations. Robots often can only detect the odor concentration at a vertical height.
Due to these factors, the odor concentration measurements are often inaccurate and contain noise. Under the influence of noise, the robot search process often appears to be prematurely stalled or meandered and sometimes even misled so that the robot is trapped in a pseudo-odor source location (Zhang Y. et al., 2014). In the subsequent sections, we will discuss how the improved PSO algorithm and the hybrid PSO algorithm weaken the effect of noise.
Experimental validation: From computer simulation to real-life scenarioAt present, three means are mainly used in active olfaction research, viz., simulation experiments, wind tunnel experiments, and field experiments to validate the OSL method. Experiments in a natural environment are the closest to the application scenarios. However, the experiments are difficult and costly to reproduce. They cannot meet the requirements of the high frequency of experiments and many changes in experimental conditions in the early research stage. Therefore, simulation was an essential tool in the initial research stage of OSL. Simulation can provide arbitrary configuration and reproducible virtual airflow environment for accurate simulation of odor plume and flow field, which helps to compare and verify the effect between different algorithms and between different improvements of the same algorithm and solve the problem of difficult reproduction and accurate comparison of odor experiments (Fan et al., 2017).
The distribution of the odor plume in the natural environment presents complex characteristics such as time-varying, interval, and multiple values (Meng et al., 2011), which are difficult to describe by constructing an accurate model. Therefore, most studies use relatively simplified numerical computational models. The plume models currently used in the OSL field mainly include the static Gaussian dispersion model (Ishida et al., 2005, 2006), Filament-based atmospheric dispersion model (Farrell et al., 2002), Lattice plume model (Balkovsky and Shraiman, 2002), Plume model based on CofinBox software package (Marques et al., 2006), etc.
PSO and its variants in OSL: Origins and progress Standard PSOParticle swarm optimization is an iterative optimization algorithm based on a simplified social population, inspired by the swarm behavior of a bird's flock: a flock of birds is searching for food randomly. There is only one piece of food in the area. All birds do not know where the food is, but they know the distance between their current position and the food. The best strategy in such a situation is to search the area around the bird that is currently closest to the food. Kennedy and Eberhart (1995) firstly proposed this algorithm for non-linear function optimization. In each iteration of PSO, every particle updates itself by tracking two “extremes” through experiences of individual and population which mean local optima and global optima, respectively. The PSO algorithm exhibits the weak computational properties of a single particle and the strong coordination of a population of particles. Therefore, it is considered as one of the most suitable optimization algorithms for multi-robot odor source localization.
The target search space is assumed to be D-dimensional in the standard PSO, and the position of the ith particle at time t can be represented as a D-dimensional vector Xi(t) = (xi1, xi2, …, xiD). The optimal position of the ith particle so far is Pi(t) = (pi1, pi2, …, piD). The best position searched by the whole particle swarm so far is Pg(t) = (pg1, pg2, …, pgD), Equation 1 gives the velocity of the ith particle in the D-dimensional search space. The three terms on the right-hand side represent the motion direction of the original, the individual optimal, and the population optimal, respectively. Equation 2 updates particles' new position. Learning factors c1and c2 are weights for options if the system is designed to tend to individual optimal or population optimal; r1and r2 are two random numbers ranging from 0 to 1, w is the inertial factor, which tends to maintain the original direction with larger values.
Vi(t+1)=wVi(t)+c1r1(Pi(t)-Xi(t)) +c2r2(Pg(t)-Xi(t)) (1) Xi(t+1)=Xi(t)+Vi(t+1) (2)Marques et al. (2006) first applied PSO to multi-robot collaboration to locate odor sources. In the plume discovery stage (which the author calls global search), they adopt a global random search strategy, integrating the repulsive force between agents and the biased crosswind motion. Once the local plume is found, it enters the local search stage, and the PSO algorithm is used for plume tracking. In this process, the fitness value of the particle is the concentration value of the pollutant where the particle is located. In the simulation experiment, the author compared the time of finding all odor sources in different atmospheric stability environments with three search algorithms: BRW local search, concentration gradient tracking, and particle swarm local search. The experiment showed that the PSO algorithm performs worst in a stable atmospheric molecular diffusion environment. However, in an unstable airflow environment with turbulence, i.e., the most realistic situation, the particle swarm search algorithm has an excellent advantage. Chen et al. (2017) proposed a multi-robot search method based on the PSO algorithm, incorporating a divergence search strategy for plume discovery and a mass flux divergence method for odor source declaration. The method was validated in a time-varying source environment with different ventilation environments, intensity variations, and obstructions.
The PSO algorithm can organize robots for search behavior but still has some drawbacks that need improvement, such as easily falling into local optima in non-ideal environments, inability to perform a multi-source search, and requiring a certain number of robots to ensure convergence speed. For better performance, scholars have made many improvements, which will be presented in the following subsection.
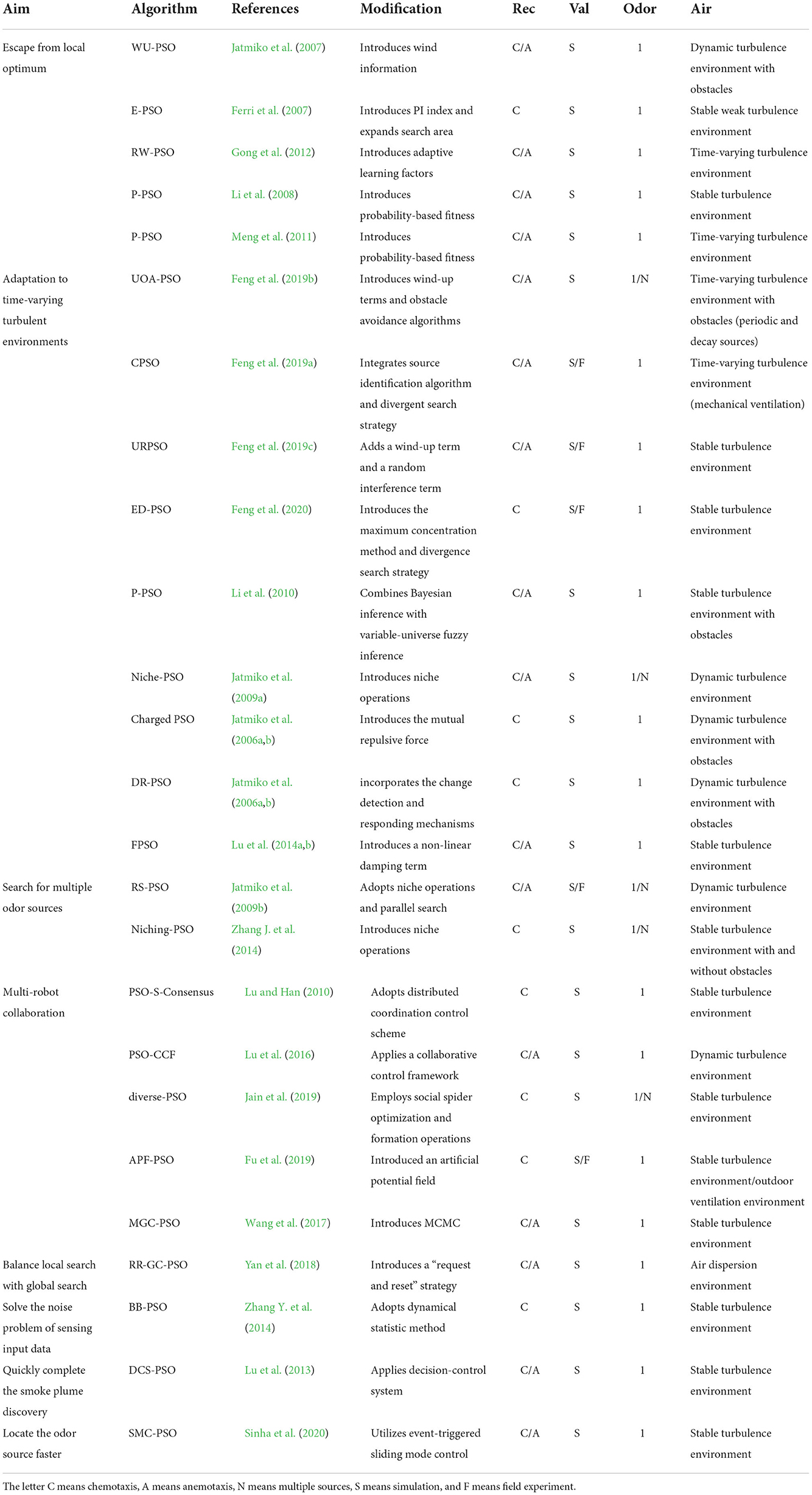
Modified PSOsTable 1 summarizes various of modified PSOs for odor source localization. The column names and their meanings are as follows: the aim of the study (Aim), the name of the modified algorithm (Algorithm), authors of the work (Author), the principal modification of the study (Modification), the reactive principle (Rec), the validation method (Val), the number of odor source being located (Odor), and the airflow environment (Air).
Table 1. Summary of the modified PSOs for odor source localization.
How agents escape from local optimaIn the ventilated indoor environment, the odor plume fluctuates and is intermittently influenced by turbulence. Larger vortices may easily lead to lengthy local maxima. To solve this problem, Jatmiko et al. (2007) were the first to exploit the chemotaxis with wind information by introducing the angle θ between the wind vector W(t) and the robot motion vector Vi*(t). Two WU-PSO methods are proposed for odor source localization in turbulent environments with obstacles. WUI is to set a forbidden area opposite the upstream direction of the turbulent flow, as shown in Equation 3, to ensure that particles move against the wind direction. WUII uses θ to calculate parameters χθ and then calculates the next updated position of particles through Equation 4.
where Jj(t) denotes the value of the luciferin level of agent j at moment t, γ is the proportionality constant used to increase the luciferin level, and ρ is the luciferin decay constant (0 < ρ < 1 ).
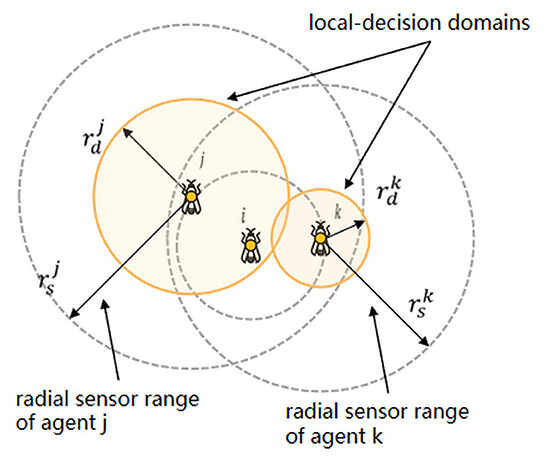
Figure 4. Glowworm i is in the sensor range of (and is equidistant to) both j and k. However, j and k have different local-decision domains, and only j uses the information of i (rdk<rdj<rsk<rsj). Figure modified from Krishnanand et al. (2006).
Benefiting from the property that the GSO can find the optimal solution of multiple optimal continuous functions (Krishnanand and Ghose, 2005; Krishnanand et al., 2006; Zainal et al., 2013) used the GSO for solving the multi-source localization problem. Variable local decision domains are also applied to glowworms. The variable local decision domain update formula for glowworm i at time t+1 is as follows, and the explicit threshold parameter nt is introduced to attenuate the oscillatory behavior of the decision domain:
rdi(t+1)=,,,]},,,]},,,]},,,,,]}],"socialLinks":[,"type":"Link","color":"Grey","icon":"Facebook","size":"Medium","hiddenText":true},,"type":"Link","color":"Grey","icon":"Twitter","size":"Medium","hiddenText":true},,"type":"Link","color":"Grey","icon":"LinkedIn","size":"Medium","hiddenText":true},,"type":"Link","color":"Grey","icon":"Instagram","size":"Medium","hiddenText":true}],"copyright":"Frontiers Media S.A. All rights reserved","termsAndConditionsUrl":"https://www.frontiersin.org/legal/terms-and-conditions","privacyPolicyUrl":"https://www.frontiersin.org/legal/privacy-policy"}'>
留言 (0)