
記住我









Visual tracking is an important task in computer vision that provides underlying technical support for more complex tasks; and is an essential procedure for advanced computer vision applications. Additionally, visual tracking has been widely used in various fields such as unmanned aerial vehicles (UAVs) (Cao et al., 2021), autonomous driving (Zhang and Processing, 2021), and video surveillance (Zhang G. et al., 2021). However, several challenges remain that hamper tracking performance, including edge computing devices and difficult external environments with occlusion, illumination variation, and background clutter.
Over the past few years, visual object tracking has made significant advancements based on the development of convolutional neural networks due to the breakthroughs that have been made to generate more powerful backbones, such as deeper networks (He et al., 2016; Chen B. et al., 2022), efficient network structure (Howard et al., 2017), attention mechanism (Hu et al., 2018). Inspired by the way of the human brain process the overload information (Wolfe and Horowitz, 2004), the attention mechanism is utilized to enhance the vital features and surpass the unnecessary information of the input feature. Due to the powerful feature representation ability, the attention mechanism becomes an important means to enhance the input features, such as channel attention (Hu et al., 2018), spatial attention (Wang F. et al., 2017; Wang N. et al., 2018), temporal attention (Hou et al., 2020), global attention (Zhang et al., 2020a), and self-attention mechanism (Wang et al., 2018). Among them, the self-attention based models, the transformer was initially designed for natural language processing (NLP) (Vaswani et al., 2017) task, where the attention mechanism is utilized to perform the machine translation tasks and achieved great improvements. Later, the pre-training model BERT (Devlin et al., 2018) achieve breakthrough progress in NLP tasks, further advance the development of the Transformer model. Since then, both academia and industry have set off a boom in the research and application of pre-trained models based on Transformer, and gradually extended from NLP to CV. For example, Vision Transformer (ViT) (Dosovitskiy et al., 2020), DETR (Carion et al., 2020), have surpassed previous SOTA in the fields of image classification, inspection, and video, respectively. Various variant models based on Transformer structure have been proposed, multi-task indicators in various fields have been continuously refreshed, and the deep learning community has entered a new era. Meanwhile, muti-level features fusion can effectively alleviate the deficiency of the transformer in handling the tracking of small objects.
Although transformer models provide enhancements in feature representation and result in promotion in terms of accuracy and robustness, trackers based on transformers have high computational costs that hinder them from meeting the real-time demands of tracking tasks on edge hardware devices, providing a disadvantage for the landing of the application. Therefore, how to balance the efficiency and efficacy of object trackers remains a significant challenge. Generally, discriminative feature representation is essential for tracking. Therefore, deeper backbones and online updaters are utilized in tracking frameworks, however these methods are computationally expensive leading to increased run time and budget. Typically, the lightweight backbone is also limited as it typically provides inadequate feature extraction, rendering the tracking model less robust for small objects or complex scenarios.
In this study, we employed a lightweight backbone network to avoid the efficiency loss caused by the computations of deep networks. To address the insufficient feature representations extracted by shallow networks, we extracted features from multiple levels of the backbone to enrich the feature representations. Furthermore, to leverage the advantages of transformers in global relationship modeling, we designed a hierarchical feature fusion module to integrate multi-level features comprehensively using multi-head attention mechanisms. The proposed Siamese hierarchical feature fusion transformer (SiamHFFT) tracker achieved robust performance in complex scenarios while maintaining real-time tracking speed on a CPU and it can be deployed on consumer CPUs. The main contributions of this study can be summarized as follows:
(1) We proposed a novel type of tracking network based on a Siamese architecture, which consisting of feature extraction, reshape module, Transformer-like feature fusion module, and head prediction modules.
(2) We designed a feature fusion transformer to exploit the hierarchical features in the Siamese tracking framework in an end-to-end manner, which is capable of advancing discriminability for small object tracking task.
(3) Comprehensive evaluations on five challenging benchmarks demonstrate the proposed tracker achieved promising results among state-of-the-art trackers. Besides, our tracker can run at a real-time speed. This efficient method can be deployed on resource-limited platforms.
The remainder of this paper is organized as follows. Section Related work describes related work on tracking networks and transformers. Section Method introduces the methodology used for implementing the proposed HFFT and network model. Section Experiments presents the results of experiments conducted to verify the proposed model. Finally, Section Conclusion contains our concluding remarks.
Related work Siamese trackingIn recent years, Siamese-based networks have become a ubiquitous framework in the visual tracking field (Javed et al., 2021). Tracking an arbitrary object can be considered as learning similarity measure function learning problems. SiamFC (Bertinetto et al., 2016) introduced a correlation layer as a fusion tensor into the tracking framework for the first time, which pioneered the Siamese tracking procedure. Instead of directly estimating the target position according to the response map, SiamRPN (Li B. et al., 2018) attaches a region proposal extraction subnetwork (RPN) to the Siamese network and formulates the tracking as a one-shot detection task. Based on the results of classification and regression branches, SiamRPN achieves enhanced tracking accuracy. DaSiamRPN (Zhu et al., 2018) uses a distractor-aware module to solve the problem of inaccurate tracking caused by the imbalance of positive and negative samples of the training set. C-RPN (Fan and Ling, 2019) and Cract (Fan and Ling, 2020) incorporate multiple stages into the Siamese tracking architecture to improve tracking accuracy. To address unreliable predicted fixed-ratio bounding boxes when a tracker drifts rapidly, an anchor-free mechanism was also introduced into the tracking task. To rectify the inaccurate bounding box estimation strategy of the anchor-based mechanism, Ocean (Zhang et al., 2020b) directly regresses the location of each point located in the ground truth. SiamBAN (Chen et al., 2020) adopts box adaptive heads to handle the classification and regression problem parallelly. SiamFC++ (Xu et al., 2020) and SiamCAR (Guo et al., 2020) draw on the FCOS architecture and add a branch to measure the accuracy of the classification results. Compared with anchor-based trackers, anchor-free-based trackers utilize fewer parameters and do not need prior information for the bounding box, these anchor-free-based trackers can achieve a real-time speed.
As feature representation plays a vital role in the tracking process (Marvasti-Zadeh et al., 2021), several works delicate to obtain discriminative features from different perspectives, such as adopting deeper or wider backbones, and using attention mechanisms to advance the feature representation. In the recent 3 years, the Transformer is capable of using global context information and preserving more semantic information. The introduction of the Transformer model in the tracking community boots the tracking accuracy to a great extent (Chen X. et al., 2021; Lin et al., 2021; Liu et al., 2021; Chen et al., 2022b; Mayer et al., 2022). However, the promotion of the accuracy of these trackers' increasingly complex models relies heavily on powerful GPUs, leading to the inability to deploy such models on edge devices, which hinders the further practical application of the models.
In this study, to optimize the trade-off between tracking accuracy and speed, we designed an efficient algorithm that employs a concise model consisting of a lightweight backbone network, a feature reshaping model, a feature fusion module, and a prediction head. Our model is capable of handling complex scenarios, and the proposed tracker can also achieve real-time speed on a CPU.
Transformer in vision tasksAs a new type of neural network, transformer shows superior performance in the field of AI applications (Han et al., 2022). Unlike the structure of CNNs and RNNs, Transformer adopts the self-attention mechanism, which has been proved to have strong feature representation ability and better parallel computing capability, making it more advantageous in several tasks.
The transformer model was first proposed by Vaswani et al. (2017) for application to natural language processing (NLP) tasks. In contrast to convolutional neural networks (CNNs) and recurrent neural networks (RNNs), self-attention facilitates both parallel computation and short maximum path lengths. Unlike earlier self-attention models based on RNNs for input representations (Lin Z. et al., 2017; Paulus et al., 2017), the attention mechanisms in transformer model are implemented with attention-based encoders and decoders instead of convolutional or recurrent layers.
Because transformers were originally designed for sequence-to-sequence learning on textual data and have exhibited good performance, their ability to integrate global information has been gradually unveiled and transformers have been extended to other modern deep learning applications such as image classification (Liu et al., 2020; Chen C. -F. R. et al., 2021; He et al., 2021), reinforcement learning (Parisotto et al., 2020; Chen L. et al., 2021), face alignment (Ning et al., 2020), object detection (Beal et al., 2020; Carion et al., 2020), image recognition (Dosovitskiy et al., 2020) and object tracking (Yan et al., 2019, 2021a; Cao et al., 2021; Lin et al., 2021; Zhang J. et al., 2021; Chen B. et al., 2022; Chen et al., 2022b; Mayer et al., 2022). Based on CNNs and transformers, the DERT (Carion et al., 2020) applies a transformer to object detection tasks. To improve upon previous CNN models, DERT eliminates post-processing steps that rely on manual priors such as non-maximum suppression (NMS) and anchor generators; and constructs a complete end-to-end detection framework. ViT (Dosovitskiy et al., 2020) mainly converts images into serialized data through token processing and introduces the concept of patches, where input images are divided into smaller patches and each patch is converted into a bidirectional encoder representation from transformers-like structure. Similar to the concept of patches in ViT, Swin Transformer (Liu et al., 2021) uses the concept of windows, but the calculations of different windows do not interfere with each other, hence, the computational complexity of the Swin Transformer is significantly reduced.
In the tracking community, transformers have achieved remarkable performance. STARK (Yan et al., 2021a) utilizes an end-to-end transformer tracking architecture based on spatiotemporal information. SwinTrack (Lin et al., 2021) incorporates a general position-encoding solution for feature extraction and feature fusion, enabling full interaction between the target object and search region during tracking process. TrTr (Zhao et al., 2021) used the transformer architecture to perform target classification and bounding box regression and designed a plug-in online update module for classification to further improve tracking performance. DTT (Yu et al., 2021) also feed these architectures to predict the location and the bounding box of the target. Cao et al. (2021) proposed an efficient and effective hierarchical feature transformer (HiFT) for aerial tracking. HCAT (Chen et al., 2022b) utilizes a novel feature sparsification module to reduce computational complexity and a hierarchical cross-attention transformer that employs a full cross-attention structure to improve efficiency and enhance representation ability. The hierarchical-based methods, both HiFT and HCAT show good tracking performance. However, transformer-based trackers lack robustness in small objects. In this paper, we propose a novel hierarchical feature fusion module based on a transformer to enable a tracker to achieve real-time speed while maintains good accuracy.
Feature aggregation networkFeature aggregation plays a vital role in the multi-level feature process, and is used to improve cross-scale feature interaction and multi-scale feature fusion, thereby enhancing the representation of features and enhancing network performance. Zhang G. et al. (2021) proposed a hierarchical aggregation transformer (HAT) framework consisting of transformer-based feature calibration (TFC) and deeply supervised aggregation (DSA) modules. The TFC module can merge and preserve semantic and detail information at multiple levels, and the DSA module aggregates the hierarchical features of the backbone with multi-granularity supervision. Feature pyramid networks (FPN) (Lin T.-Y. et al., 2017) introduce cross-scale feature interactions and achieve good results through the fusion of multiple layers. Qingyun et al. (2021) introduced a cross-modality fusion transformer, that makes full use of the complementarity between different modalities to improve the performance of features. However, the main challenge of a simple feature fusion strategy is how to fuse high-level semantic information and low-level detailed features. To address these issues, we propose an aggregation structure based on hierarchical transformers, which can fully mine the coherence among multi-level features at different scales, and achieve discriminative feature representation ability.
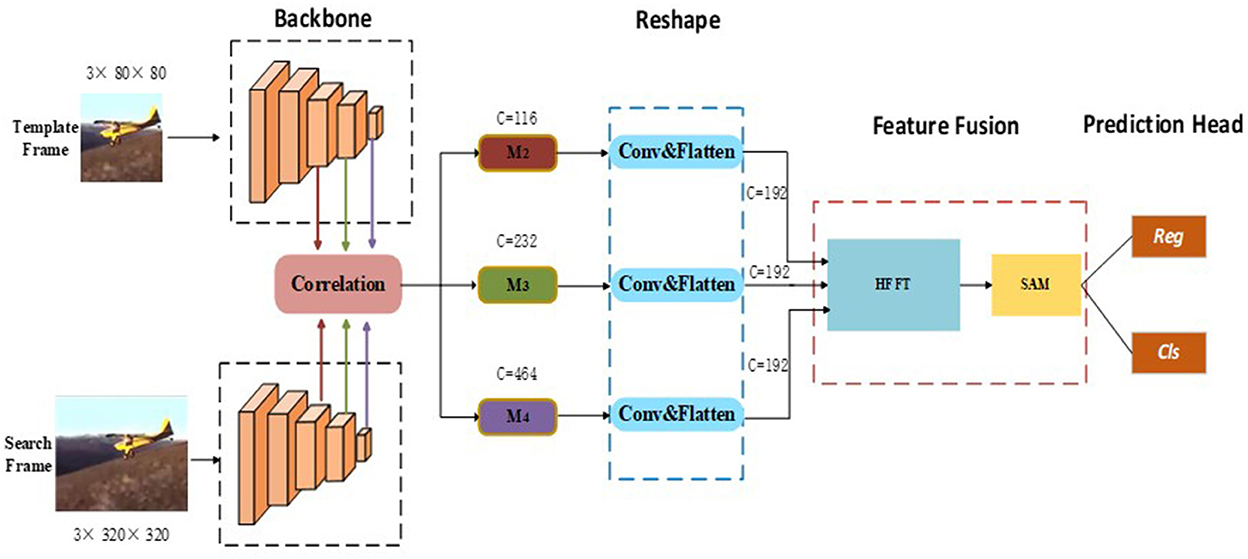
Method OverviewIn this section, we describe the proposed SiamHFFT model. As can be seen in Figure 1, our model follows a Siamese tracking framework. There are four key components in our model, namely the feature extraction module, reshape module, feature fusion module, and prediction head. During tracking, the feature extraction module extracts feature from the template and search region. The features of the two branches from the last three layers of the backbone are correlated separately, and the outputs are denoted as M2, M3, and M4 in order. We then feed the correlated features into the reshaping module, which can transform the channel dimensions of the backbone features and flatten features in the spatial dimension. The feature fusion module is implemented by fusing features using our hierarchical feature fusion transformer (HFFT) and a self-attention module. Finally, we used the prediction head module to perform bounding box regression and binary classification on the enhanced features to generate tracking results.
Figure 1. Architecture of the proposed SiamHFFT tracking framework. This framework contains four fundamental components: a feature extraction network, reshaping module, feature fusion module, and prediction head. The backbone network is used to extract hierarchical features. The reshaping module is designed to perform convolution operations and flatten features. The feature fusion transformer consists of the proposed HFFT module and a self-attention module (SAM). Finally, bounding boxes are estimated based on the regression and classification results.
Feature extraction and reshapingSimilar to most Siamese tracking networks, the proposed method uses template frame patch (Z ∈ ℝ3×80×80) and search frame patch (X ∈ ℝ3×320×320) as inputs. For the backbone, our method can use an arbitrary deep CNN such as ResNet, MobileNet (Sandler et al., 2018), AlexNet, or ShuffleNet V2 (Ma et al., 2018). In this study, because a deeper network is unsuitable for deployment with limited computing resources, we adopted ShuffleNetV2 as a backbone network. This network is utilized for both template and search branch feature extraction.
To obtain robust and discriminative feature representations, we incorporate detailed structural information into our visual representations by extracting hierarchical features with different scales and semantic information in stage two, three and four of feature extraction. We denote feature tokens from the template branch as Fi(Z) and those from the search branch as Fi(X), where i represents the stage number of feature extraction and i ∈ .
Next, a convolution operation is performed on the feature maps from the multi stages correlation, which is defined as:
Mi=Fi(Z)*Fi(X),i=2,3,4, (1)where Mi∈ℝCi×Hi×Wi, and C, H, and W denote the channel, width, and height of the feature map respectively. Additionally, Ci ∈ and * denotes the cross-correlation operator. Next, we use the reshaping module which consists of 1 × 1 convolutional kernels, to change the channel dimensions of the features from Equation (1). We then flatten the features in the spatial dimension because a unified channel can not only effectively reduce computing resource requirements, but is also an essential component for improving the performance of feature fusion. After these operations, we can obtain a reshaped feature map Mi′∈ℝWiHi×C, where C = 192.
Feature fusion and prediction headAs illustrated in Figure 1, following the convolution and flattening operations in the reshaping module, the correlation features from different stages are unified in the channel dimension. To explore the interdependencies among multi-level features fully, we designed the HFFT, which is detailed in this section.
Multi-Head Attention (Vaswani et al., 2017): Generally, transformers have been successfully applied to enhance feature representations in various bi-modal vision tasks. In the proposed feature fusion module, the attention mechanism is also a fundamental component. It is implemented using an attention function and operated on queries Q, keys K and values V using the scale dot-production method, which is defined as:
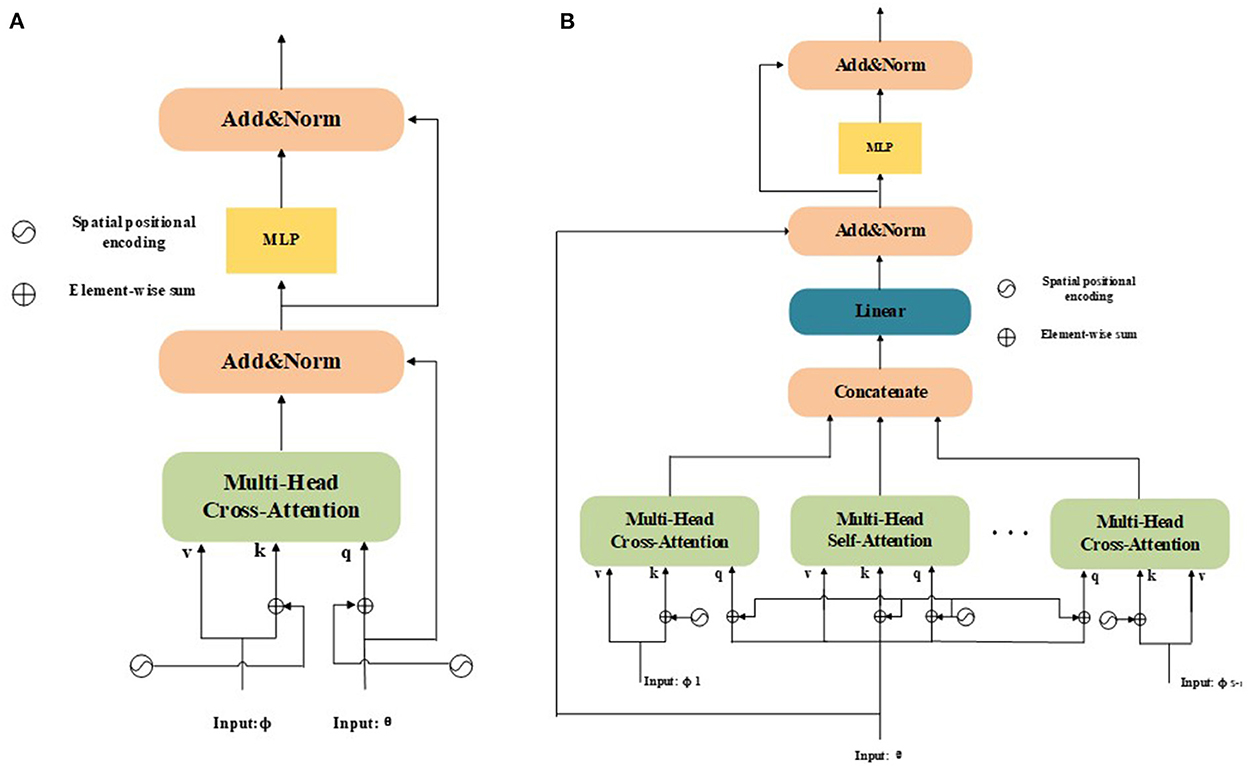
Attention(Q,K,V)=softmax(QK⊤C)V (2)where C is the key dimensionality for normalizing the attention, andC is a scaling factor to avoid gradient vanishing in the loss function. Specifically, Q=[q1,…,qN]T∈ℝN×C is the q input in Figure 2B, which denotes a collection of N features; similarly, K and V are the k and v inputs, respectively, which represent a collection of Mfeatures (i.e., K, V ∈ ℝM×C). Notably, Q, K, V represent the mathematical implementation of the attention function and do not have practical meaning.
Figure 2. (A) Structure of a dual-input tasks; (B) Structure of a multi-input tasks. Unlike the original dual-input tasks, multi-input tasks can be used to learn the interdependencies of multi-level features and enhance the feature representation of the model in an end-to-end manner.
According to Vaswani et al. (2017), extending the attention function in Equation (2) to multiple heads is beneficial for enabling the mechanism to learn various attention distributions and enhancing its feature representation ability. This extension can be formulated as follows:
MultiHead(Q,K,V)=Concat(head1,…headh)Wo (3) headi=Attention(QWiQ,KWiK,VWiV),i=1,…h (4)where WiQ, WiK and WiV∈ℝC×dh, and Wo ∈ ℝC×C. Here, h is the number of attention heads, which is defined as dh=Ch. In this study, we adopted and h = 6 as default values.
Application to Dual-Input Tasks: The structure of a dual-input task is presented in Figure 2A, where Q, K, and V for normal NLP/vision tasks (Nguyen et al., 2020) share the same modality. In recent years, this mechanism has been extended to dual-inputs and applied to vision tasks (Chen X. et al., 2021; Chen et al., 2022a,b). However, the original attention mechanism cannot distinguish between the position information of different input feature sequences. The original mechanism only considers the absolute position and adds absolute positional encodings to inputs. It considers the attention from a source feature ϕ to a target feature θ as:
Aϕ(θ)=MultiHead(θ+Pθ,ϕ+Pϕ,ϕ) (5)where Pθ and Pϕ are the spatial positional encodings of features θ and ϕ, respectively. Spatial positional encoding is generated using a sine function. Equation (5) can be used not only as a single-direction attention enhancement, but also as a co-attention mechanism in which both directions are considered. Furthermore, self-attention from a feature to itself is also defined as a special case:
Aθ(θ)=MultiHead(θ+Pθ,θ+Pθ,θ) (6)As shown in Figure 2A, following Equations (5) and (6), the designed transformer blocks are processed independently. Therefore, the two modules can be used sequentially or in parallel. Additionally, a multilayer perceptron (MLP) module is used to enhance the fitting ability of the model. The MLP module is a fully connected network consisting of two linear projections with a Gaussian error linear unit (GELU) activation function between them, which can be denoted as:
MLP(θ′)=FC2(GELU(FC1(θ′))) (7)Application to Multi-Input Tasks: To extend the attention mechanism to multiple inputs that are capable of handling multimodal vision tasks, pyramid structures, etc., we denote the total input number as S. The structure of a multi-input task is presented in Figure 2B. If we consider each possibility, there are a total of S(S − 1) source-target cases and S self-attention cases. Now, we denote the multiple inputs as , where the target θ ∈ ℝN×C and source ϕi∈ℝM×C. Notably, θ and ϕi must have the same size as C. We then compute all the source-target cases as . Next, we concatenate all source-to-target attention cases with self-attention Aθ(θ), which can be formulated as:
θconcat=[Aθ(θ),Aϕ1(θ),…,AϕS-1(θ)] (8)where θconcat∈ℝN×SC. After concatenation, the dimensions of the enhanced features in the channel change to match the size SC of the original feature. To accelerate these calculations further, we apply a fully connected layer to reduce the channel dimensions to:
θconcat′=Linear[θconcat] (9)where θconcat′∈ℝN×C. Through this process, we can obtain more discriminative features efficiently by aggregating features from different attention mechanisms.
HFFT: As is shown in Figure 2B, in our model, we make full use of the hierarchical features Mi′∈ℝWiHi×C (i ∈ ) and generate tracking-tailored features. To integrate low-level spatial information with high-level semantic information, we feed the reshaped features from the output of Equation (1), namely M2′, M3′, and M4′, into the HFFT module, where M3′ is used for target feature, M2′ and M4′ represent source features. The importance of different aspects feature information is assigned by applying the cross-attention operator to M2′ and M4′, which is beneficial for obtaining more discriminative features. We apply self-attention to M3′, which can preserve the details of target information during tracking. Furthermore, positional information is encoded during the calculation process to enhance spatial information during the tracking process. The attention mechanisms are implemented using the operation of K, Q, V. Then, comprehensive features can be obtained by concatenating the outputs. Due to the complexity of a model increases with its input size, a fully connected layer is utilized to resize outputs. We also adopt residual connections around each sub-layer. Additionally, we use an MLP module to enhance the fitting ability of the model, and layer normalization (LN) is performed before the MLP and final output steps. The entire process of the HFFT can be expressed as:
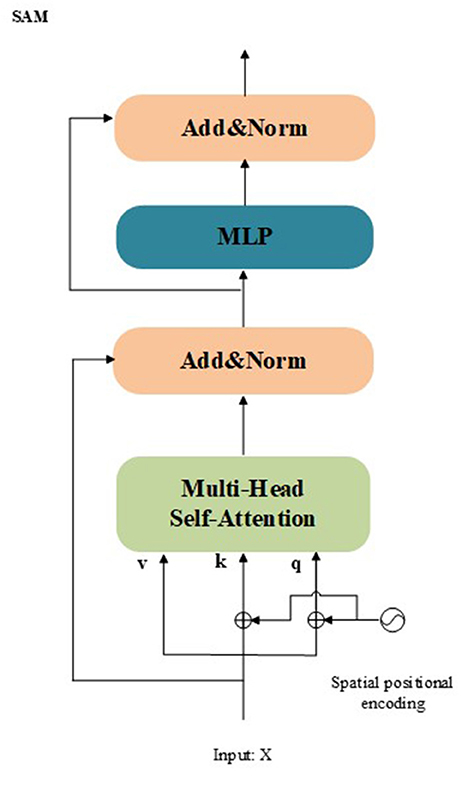
Mconcat=[AM3′(M3′),AM2′(M3′),AM4′(M3′)], Mconcat′=Linear[Mconcat], Mout=LN(Mconcat′+M3′), Xout=LN(Mout+MLP(Mout)) (10)SAM: The SAM is a feature enhancement module. The structure of the SAM is presented in Figure 3. The SAM adaptively integrates information from different feature maps using multi-head self-attention in the residual form. In the proposed model, the SAM take the out of Equation (10) Xout as input. The mathematical process of the SAM can be summarized as:
Xout2=LN(MultiHead(Xout+PX,Xout+PX,Xout)+Xout), XSAM=LN(MLP(Xout2)+Xout2) (11)Figure 3. Architecture of the proposed SAM.
Prediction Head: The enhanced features are reshaped back to the original feature size before being fed into the prediction head. The head network consists of two branches: a classification branch and bounding box regression branch. Each branch consists of a three-layer perceptron. The former is utilized to distinguish the target from the background, and the latter is used for estimating the location of the target by using a bounding box. Overall, the model is trained using a combination loss function formulated as:
L=λclsLcls+λgiouLgiou+λlocLloc (12)where Lcls, Lgiou, and Lloc represent the binary cross-entropy, GIOU loss, and L1-norm loss, respectively. λcls, λgiou, and λloc are coefficients that balance the contributi
留言 (0)