
記住我










Modern reconnaissance threats to ground-based military facilities are mainly derived from air-based unmanned reconnaissance and space-based satellite reconnaissance. Due to the longer detection range and high load requirements, this provides the possibility for ground targets to carry out deformation camouflage. The core problem of camouflage is to solve the integration problem of camouflage patterns and the surrounding background environment. How to quickly and accurately generate camouflage patterns has become a hot and difficult point of current research.
Many scholars have conducted many studies on camouflage design and improvement. Wei et al. (2021) generated camouflage patterns using a combination of convolutional kernels and clustering algorithms. Du et al. (2012) designed a method to generate camouflage patterns through parameter control. Xue et al. (2016) designed digital camouflage by the recursive overlap of pattern templates Yang and Yin (2014) developed a target camouflage pattern generation method by using a k-means algorithm to extract the background primary color and combine it with a color similarity control algorithm. Yunxiang et al. (2019) proposed a digital camouflage pattern design method for a three-dimensional model of equipment, which is a good guide for the camouflage of ground equipment. Yong et al. (2009) used an improved k-means algorithm for camouflage color selection and patching, based on which bionic camouflage design is carried out. Xiao et al. (2021) propose a camouflage generation algorithm based on rectangular block scrambling and a fuzzy C-mean (FCM) clustering method.
A comprehensive study of camouflage pattern design by different scholars shows that the k-means clustering method is widely used in camouflage pattern design because of the advantage of simple and fast background pattern primary color extraction, but the k-means algorithm is difficult to obtain the global optimal solution due to the inaccuracy of iterative results when processing large data images and is affected by noise points (Yu and Shuang, 2012). There is a need to provide a fast and efficient image compression enhancement method combined with k-means to improve the accuracy of the output results of the camouflage pattern design method.
In this paper, we propose a new artifactual image design method for the problem that the k-means clustering algorithm is inaccurate in processing the iterative results of big data images and leads to the poor artifactual effect of the generated images. Chapter 2 of this paper presents the Max pooling-Laplacian algorithm. The Max pooling-Laplacian algorithm is used to pre-process the initial background data, Max pooling mainly focuses on compressing the background image to reduce the amount of data and remove undesirable noise without changing the key features of the image, and the Laplacian algorithm enhances the image features to make the background image simple and easy to handle. Chapter 3 of this paper introduces the k-means and k-means++ algorithms. The clustering algorithm is chosen to use the k-means++ algorithm to select the clustering center that can reflect the image features more so that the camouflage pattern design method in this paper can generate camouflage patterns with a better camouflage effect. Chapter 4 of this paper conducts the evaluation of the camouflage method. Chapter 5 of this paper conducts camouflage experiments, and this paper designs camouflage experiments under different weather conditions to verify the application value of the camouflage pattern generation method.
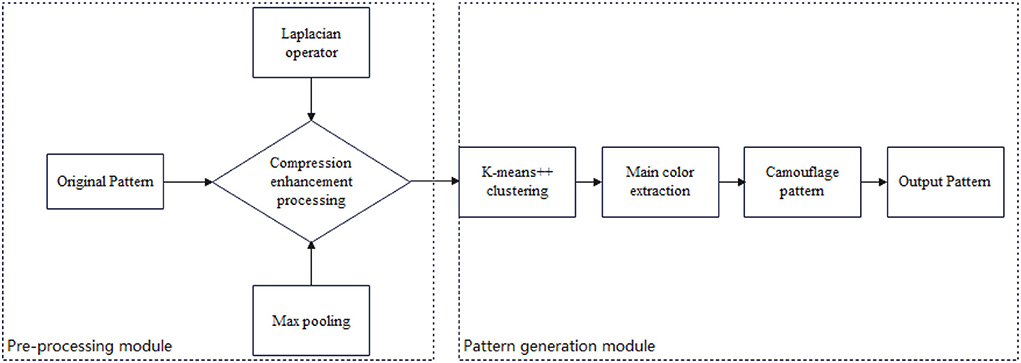
The main contribution of this paper is to discover that the reason for the inaccurate results of the k-means traditional method for generating camouflage patterns is mainly that the k-means algorithm converges to a locally optimal solution when dealing with large and complex data, while camouflage patterns are mostly from aerial photographs of large and complex background patterns. The combination of the Max pooling-Laplacian algorithm and k-means++ is proposed to solve the problem that the camouflage pattern is not well-camouflaged enough. Figure 1 shows the overall design diagram.
Figure 1. Overall design diagram.
Image compression and enhancement based on Max pooling-Laplacian algorithmIn view of the different sources of background images, image quality and image content differ greatly, and the various types of background images acquired using high-definition lenses are rich in content and detail, which are detrimental to the k-means generated images and will affect the effectiveness of the program processing, it is necessary to compress and enhance the acquired data. Compression refers to reducing the image size while preserving the key features of the image, and enhancement is to perform differential operations on the data to sharpen the image and enhance the contrast. In this paper, the Max pooling-Laplacian algorithm is used for image compression and enhancement of the target background.
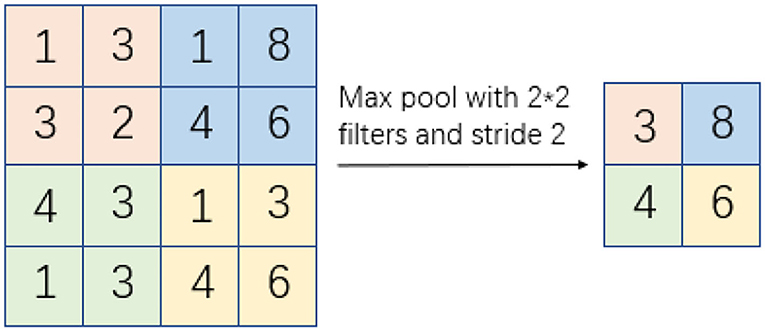
Max pooling compression processingPooling refers to the pooling model (de Souza Brito et al., 2021), and pooling means that when computing the features of a region of an image, all the features of that region must be dissected and a new feature is used to represent all the features of the original region, which is also known as the neighborhood. Pooling has an obvious characteristic of reducing the size of the feature map while preserving the features, reducing the computational effort of the algorithm, and avoiding the phenomenon of computational overfitting. The pooling process is shown in Figure 2.
Figure 2. Pooling process.
In Figure 2, the original feature image is a 4 x 4 matrix, from which it can be seen that the neighborhood is a 2 x 2 matrix with a pooling move step of 2, which eventually forms a new subsampled feature image of a 2 x 2 matrix. The pooling function S0 and the expressions are as follows:
T = S0(H)+b2 (1)where T is the subsampled feature map, H is the original feature map, and b2 is the resultant bias.
There are three common pooling operations: average pooling, Max pooling, and random pooling. Average pooling refers to summing the feature points in the neighborhood and taking the average as the subsampling feature value, and Max pooling refers to selecting the largest feature value in the pooling domain as the subsampling feature value. Random pooling refers to the random selection of features in the neighborhood according to the size of the probability value, and the larger feature value has a higher probability of being selected, unlike Max pooling where only the largest feature value is selected.
Compared with average pooling and random pooling, Max pooling can better preserve the texture features of the image and is more suitable for camouflage pattern design. In this paper, Max pooling is used to compress the image. The expression of Max pooling is where the moving step is set to c and(Hij) denotes the maximum feature value in the original feature map H of size c × c of the field captured the maximum feature value.
Tij = (Hij)+b2 (2)where Tij is the subsampled feature map, Hij is the original feature map, and b2 is the resultant bias.
Laplacian image filtering enhancement processingAfter the maximum pooling compression process, the efficiency of the program in processing the patterns is greatly improved, but the patterns after the compression process are reduced in clarity and content details. On the other hand, there is still noise in the four background patterns after the compression process that affects the processing results, which has a negative impact on the final processing effect. Noise removal is often done by filtering, which enhances the contrast and makes the processing effect more obvious. If the image is sharpened, it needs to be filtered, taking differential operations. In this paper, the filter template generated by the Laplace differential operator (Ilk et al., 2011) is chosen as the filter for sharpening the image background. The Laplace operator is defined as the scatter of the gradient of the function. Since the picture is a plane with only two directions x and y so set the function f (x, y).
The gradient of the function f (x, y) at the point (x, y) in the plane coordinate system:
∇f(x,y) = = fx(x,y) • i⇀+fy(x,y) • j⇀ (3)The scatter of the function f (x, y) in the plane coordinate system:
divf = ∇•f = ∂fx∂x+∂fy∂y (4)The function f (x, y) Laplace operator is defined as follows:
∇2f(x,y) = ∂2f(x,y)∂x2+∂2f(x,y)∂y2 (5)where x and y represent the Cartesian coordinates of the x–y plane. In image processing, it is necessary to deform the general function Laplace operator to represent its discrete form in the x, y direction by the Laplace operator.
Discrete first-order differential equations:
∂f∂x = f(x+1) - f(x) (6)Discrete second-order differential equations:
∂2f∂x2 = f(x+1)+f(x-1)-2f(x) (7)The discretized Laplace operator is obtained and its approximate expression is shown in Equation 5.
,,,]},,,]},,,]},,,,,]}],"socialLinks":[,"type":"Link","color":"Grey","icon":"Facebook","size":"Medium","hiddenText":true},,"type":"Link","color":"Grey","icon":"Twitter","size":"Medium","hiddenText":true},,"type":"Link","color":"Grey","icon":"LinkedIn","size":"Medium","hiddenText":true},,"type":"Link","color":"Grey","icon":"Instagram","size":"Medium","hiddenText":true}],"copyright":"Frontiers Media S.A. All rights reserved","termsAndConditionsUrl":"https://www.frontiersin.org/legal/terms-and-conditions","privacyPolicyUrl":"https://www.frontiersin.org/legal/privacy-policy"}'>
留言 (0)